| Self-content,
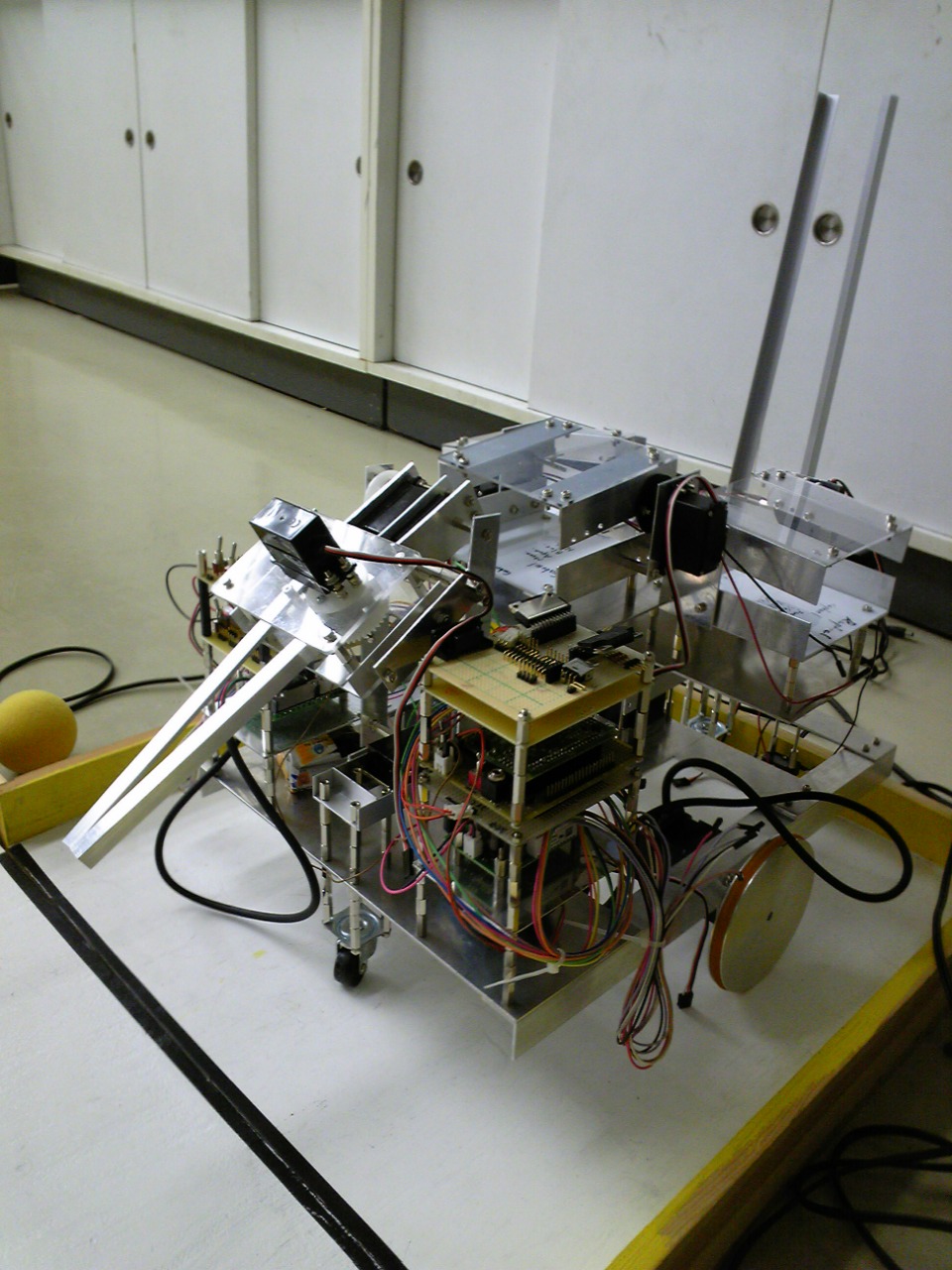
Single-robot L:450mm * W:380mm * H:500mm, 6.3kg, 400mm/s Distance sensor, Sensors using lightwave, Hand, Appeals: 足回りには去年この大会の副賞としていただいた五相ステッピングモーターを使用しています。五キロを超えるこの超弩級ロボットを軽々と運んでくれるので非常に助かっています。 巨大ロボットとなってしまいましたが、速度を追求してみました。また、加減速もがんばってます。 また、ターンテーブルの構造には結構こだわったのでレールを展開しボールをゴールする姿を見せられればうれしいです。 Characteristics: ロボットがボールゾーンまで到達するとロボットはボールを探し、見つけるとハンドを使用して後ろにあるターンテーブルに乗せます。ターンテーブルには最大三つまでのボールを乗せることができ、それぞれに色分け装置がついています。 三つまでボールがたまるとロボットはボールゾーンの所定の位置に就き、そこでレールを展開します。そしてレールをゴールの方向へと向け、ボールを転がし、ゴールします。 基本的に等加速度運動で動きます。 プログラムにはC言語を使用し、マイコンはH8-3052Fです。 |