亜瑠美(亜瑠美)
RUR-チーム脱Z系(RUR-チーム脱Z系)
東京農工大学ロボット研究会
自立型,単独型
長---mm×幅---mm×高---mm, 重---kg, 速---mm/s
ライントレース, 距離センサ,
ハンド,
アピール
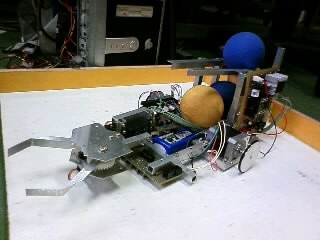
アクチュエータの数を絞って機体を製作しました。
ロボットの特徴
ボールの取り込みと得点をハンド1本で行います。ハンドでボールをつかみ、後方のレールにのせてため込みます。得点時はレールによって下まで転がったボールをハンドで取り出します。
競技結果:
一次 競技点: 0.00 審査点: --- 補正: 0 合計:0.00 パ: --- チャ: --- 芸:--- 速:---