| Self-content,
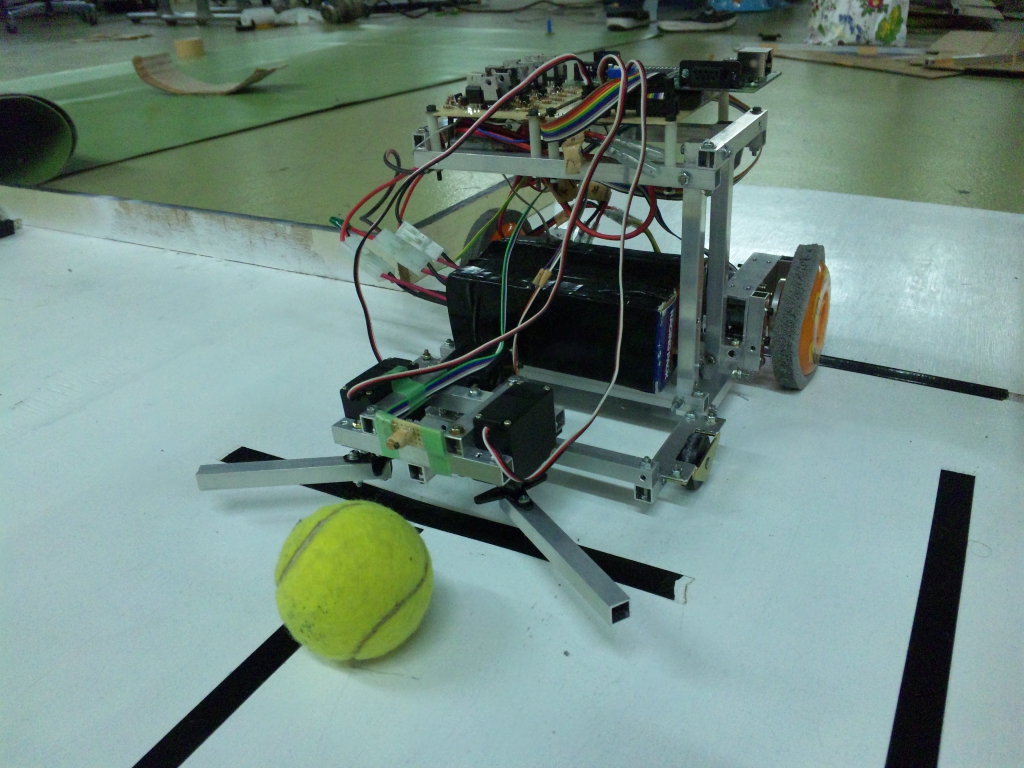
Single-robot L:250mm * W:265mm * H:220mm, 2kg, 550mm/s Distance sensor, Appeals: 初出場ですががんばります! Characteristics: このロボットは、あらかじめ人が操縦したデータをマイコン内のRAMおよびEEPROMにコマンドとして記録・保存し、そのデータを読み取ることによって走行します。 (私たちは「データトレース」と呼称しています) コマンドは文字として記録され、マイコン内でテキストファイルとして保存されているため、記録されたデータをPCで読み出して修正を加えることも可能です。 これにより、ライントレース等では実現できない精密な動作が可能となっています(一応)。 ボールをつかむ機構としては爪方式を採用し、ボールを検知すると同時に爪を閉じて色の識別をし、決められたゴールにボールを入れます(多分)。 この他にはボール検知用の測距センサとボールの色を識別するカラーセンサを搭載しています。 |