| Self-content,
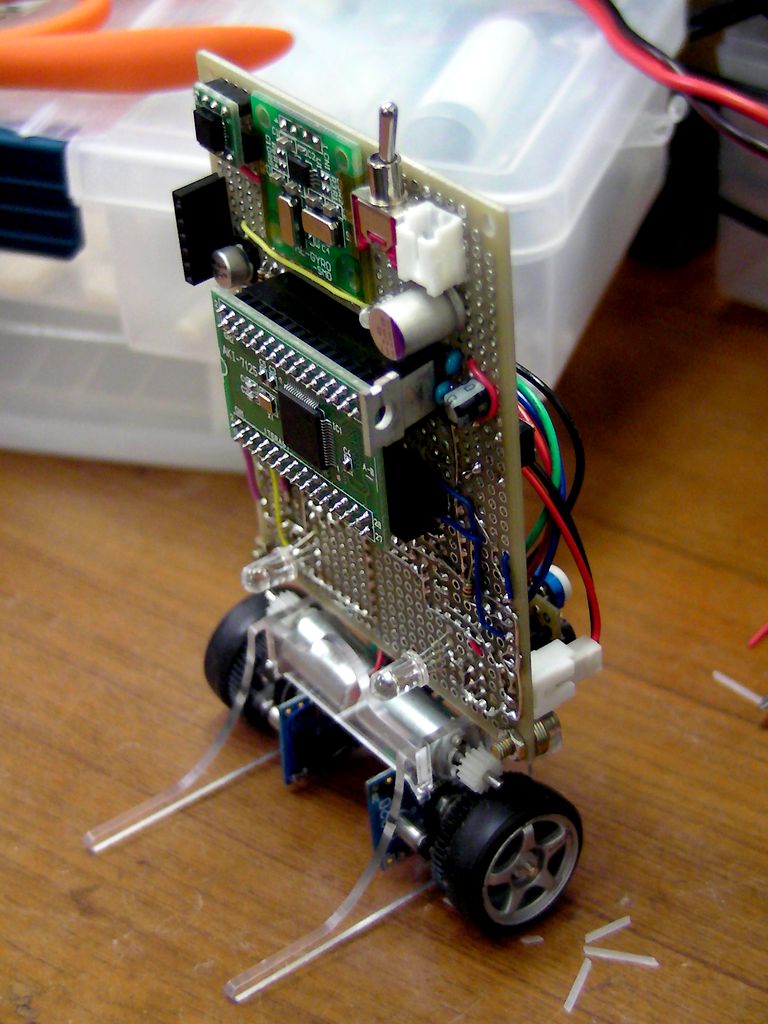
Single-robot L:60mm * W:75mm * H:130mm, 0.15kg, 2000mm/s Line-trace, Dead-reconing, Sensors using lightwave, Appeals: ボールを持つ事によって重心が変わる(振子の傾きが変わる)事をアピールする為に、なるべく軽く作りました。 また、ほとんどが入手しやすい部品で、費用も安く済んでいます。1万円程度です。 Characteristics: 倒立振子ロボットです。姿勢の制御にはジャイロセンサと加速度センサを使っています。 車軸に磁石を取り付け、磁気式のエンコーダICを搭載していて、速度制御とオドメトリに使用します。 ライントレース用のセンサを3つ、色分け兼ボール発見用のフルカラーLED+フォトトランジスタを2つ使用して、状況確認を行います。 制御にニューロ制御を用いて、非線形な特性を持つ倒立振子のFF補償を行う予定です。 動作の見どころは、ボールを持ち上げる時の重心の移動です。 |