ペンタム(ペンタム)
茨大ロボ研”僕と握手しようよ”(ぼくとあくしゅ)
茨城大学ロボット技術研究会
自立型,単独型
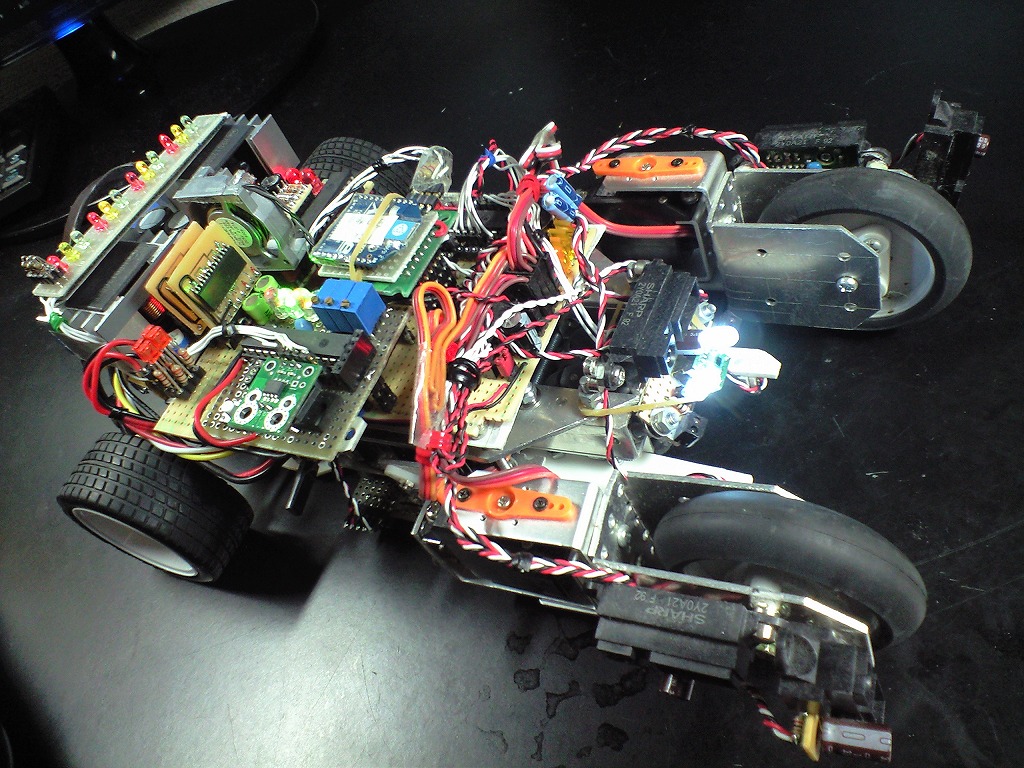
長300mm×幅170mm×高90mm, 重2kg, 速50mm/s
ライントレース, デッドレコニング, 距離センサ,
光センサ, ハンド,
アピール
ゲームコントローラを接続し有線で操縦したり、PCから無線で操縦したり各センサーのデータを見ることが可能。
ロボットの特徴
5個のマイコン、多数のセンサーを搭載し、5個の車輪による3輪モードと4輪モードが特徴の機体。ゲーム用のマウスを移動距離センサーとして用いている。電池の電圧、電流を監視し異常があれば即座に電源をカットする。
競技結果:
一次 競技点: --- 審査点: --- 補正: --- 合計:--- パ: --- チャ: --- 芸:--- 速:---
二次 競技点: --- 審査点: --- 補正: --- 合計:--- パ: --- チャ: --- 芸:--- 速:---
決勝 競技点: 5.00 審査点: 36.25 補正: 0 合計:41.25 パ: 13.75 チャ: 7.00 芸:7.75 速:7.75