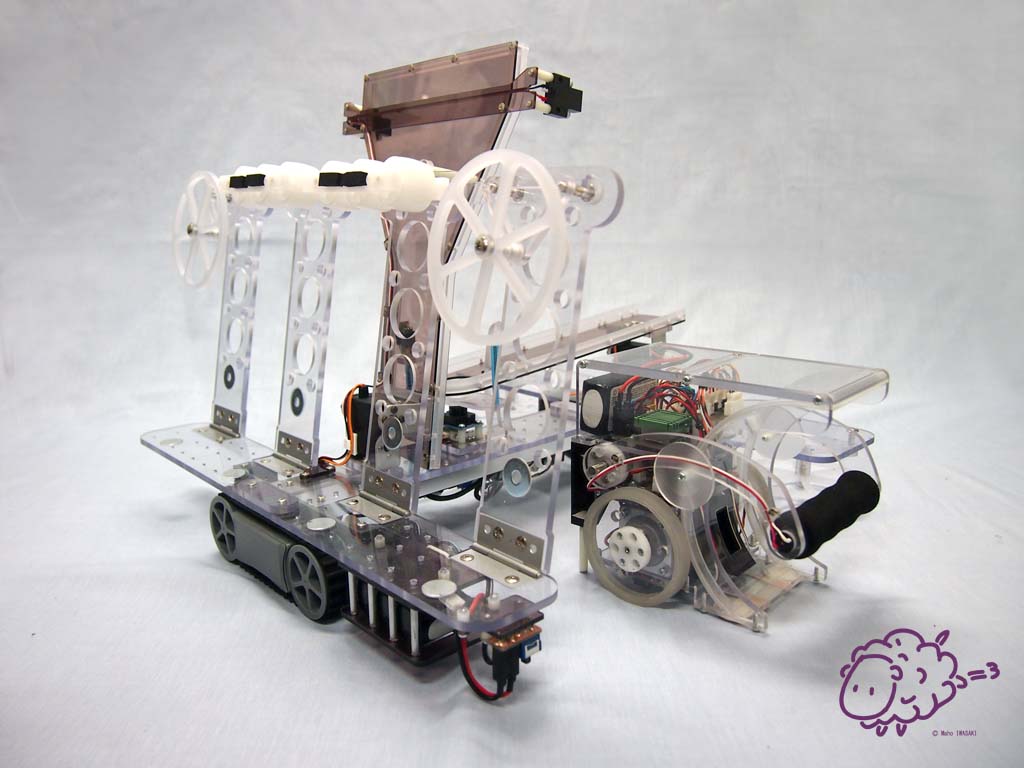
| 自立型,複数型 長180mm×幅140mm×高160mm, 重1.2kg, 速400mm/s ライントレース, デッドレコニング, 距離センサ, 協調動作, ローラ, アピール 今年の課題は、ボールの正確な位置検出と、色分け・ゴールロボットのスムーズな移動です。 ロボットの特徴 ボールをとるロボットと、そのロボットからボールを受け取り、色を判断してゴールに入れるロボットが協調して動作します。ボールの取り込みは回転するローラーによって行い、そのまま取り込み機構の上部からボールを放出することで、色分け・ゴールロボットにボールを引き渡します。引き渡されたボールは、スロープで色判断の場所に送り、適切なゴールの位置に移動してから、もう一つのスロープで、ボールをゴールに送ります。タイミング調整は、無線通信で行っています。 |