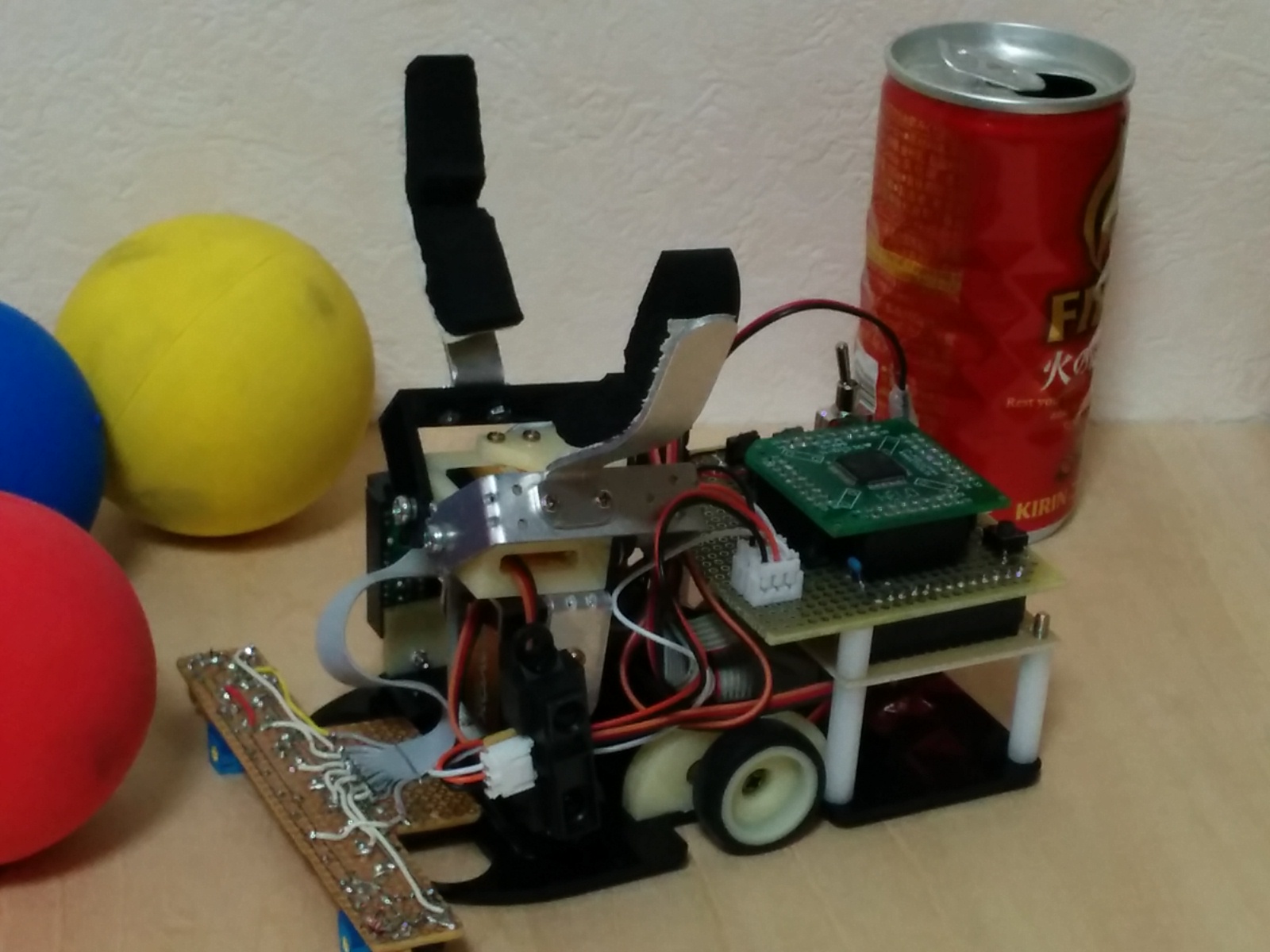
| 自立型,単独型 長160mm×幅80mm×高60mm, 重0.33kg, 速1500mm/s ライントレース, デッドレコニング, 距離センサ, ビジョンセンサ, 光センサ, ハンド, アピール コンテストの課題遂行に最適なサイズはもう少し上にあると思われますが、あえて小さくすることに挑戦しています。対象物1個あたりの探索と運搬の時間を短くしてタイムトライアルに挑みます。 ロボットの特徴 PSD距離センサーで対象物を探し、ハンドで把持して運びます。手先のCMOSカメラと透過型フォトインタラプタで対象物の色と種類をそれぞれ見分けます。床ラインセンサーにはアナログ式を採用し、たった4個のセンサーしかないにも関わらず高速できめ細かいライントレース制御を実現しています。またラインに沿った1次元座標系での自己位置推定と競技台マップの照合を行っており、曲がり角での減速と交差点誤検出回避を行っています。 |