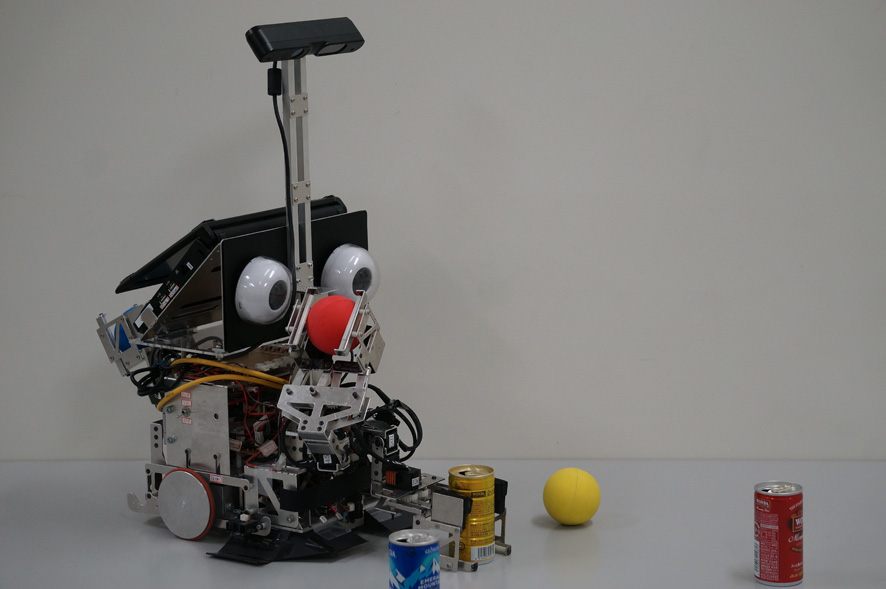
| 自立型,単独型 長425mm×幅315mm×高610mm, 重8.5kg, 速1000mm/s デッドレコニング, 距離センサ, ビジョンセンサ, ハンド, アピール ボルトは本当はすんごく速いんですが,競技台では狭くて全力で走れません.動画の方に収録しました! 黒いラインを一切用いず,非接触で自己位置を補正すること. ロボットアバタが話します.聞こえる人には聞こえる不思議感覚! ロボットの特徴 RGB-Dカメラを用いた物体の判別.3次元の点群データを用いて,ボールと缶の形状を判別し,色情報を用いて,色を判別します. RGB-Dカメラから対象物の数,位置等が一度に取得可能です.複数の判断基準(例えば,物体までの距離)から最適な経路を生成して物体を回収します. |