goldfish(goldfish)
三鷹ハードウェアエンジニアカフェ Aチーム(HwCafe A)
三鷹ハードウェアエンジニアカフェ
自立型,複数型
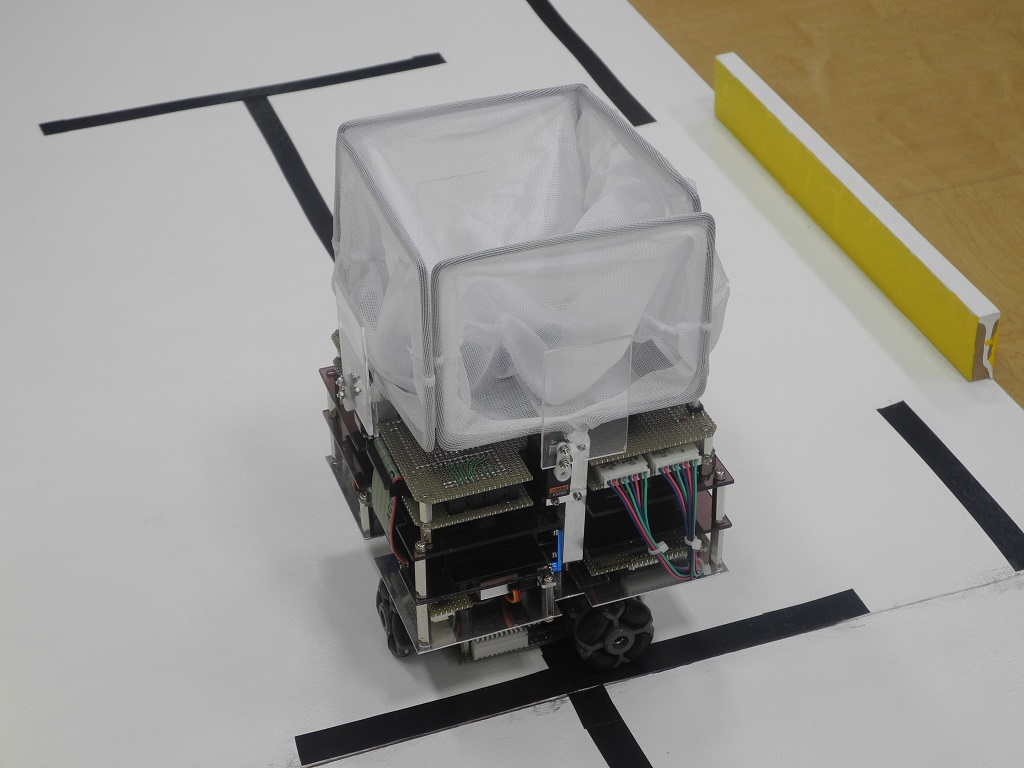
長155mm×幅155mm×高250mm, 重3kg, 速100mm/s
ライントレース, ビジョンセンサ,
アピール
Kinectとロボットの協調
ロボットの特徴
スタートエリアにKinectを置き、ボールの位置を正確に把握 します。それを無線(Bluetooth)にて別ロボットに伝え、 そのロボットが各ボールを回収に向かいゴールへ運びます。
競技結果:
一次 競技点: 12.00 審査点: --- 補正: 0 合計:12.00 パ: --- チャ: --- 芸:--- 速:---
敗復 競技点: 5.00 審査点: --- 補正: 0 合計:5.00 パ: --- チャ: --- 芸:--- 速:---
二次 競技点: 5.00 審査点: 37.00 補正: 0 合計:42.00 パ: 15.67 チャ: 8.34 芸:7.00 速:6.00