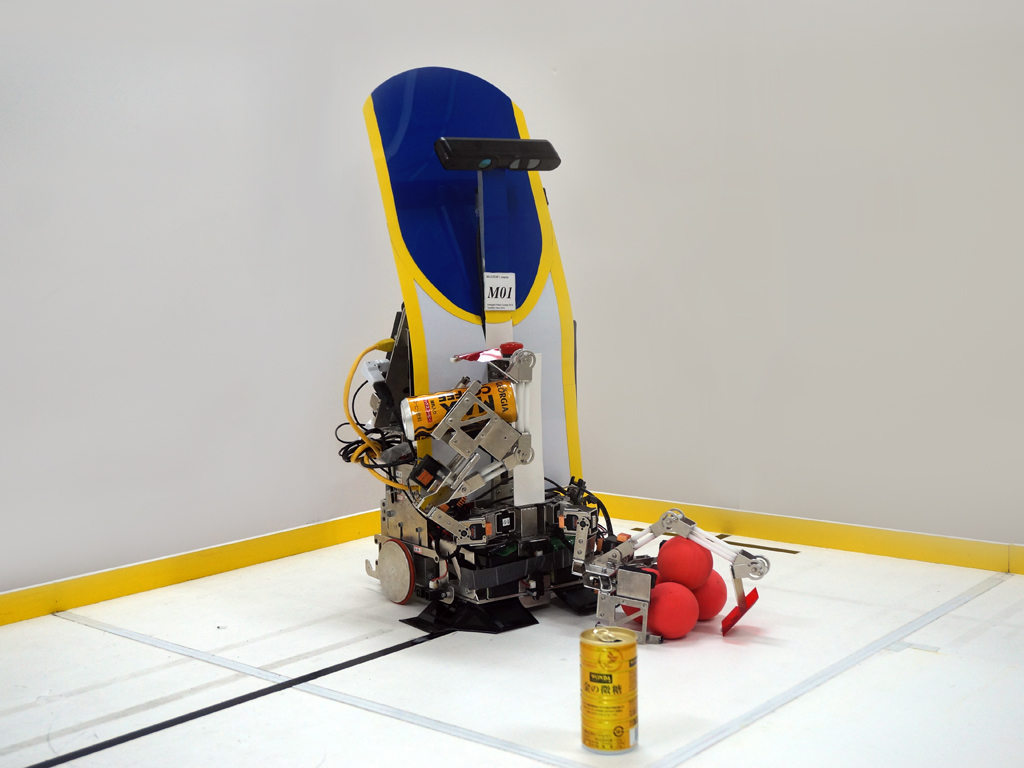
| 自立型,単独型 長425mm×幅315mm×高610mm, 重7.9kg, 速1000mm/s デッドレコニング, 距離センサ, ビジョンセンサ, ハンド, アピール O. I. T. ボルトを改良し,新たなロボットとしてがんばります! 音声も変わりました. 技術ですべての問題(課題)を解決します. ロボットの特徴 RGB-Dカメラを用いた物体の判別.3次元の点群データを用いて,ボ ールと缶の形状を判別し,色情報を用いて,色を判別します. RGB-Dカメラから対象物の数,位置等が一度に取得可能です.複数 の判断基準(例えば,物体までの距離)から最適な経路を生成して 物体を回収します. さらに,缶の向きの推定,ペットボトルおよびボールピラミッドの検出が可能です. 自己位置推定は,黒いラインを一切用いず,非接触で行います. |