| Self-content,
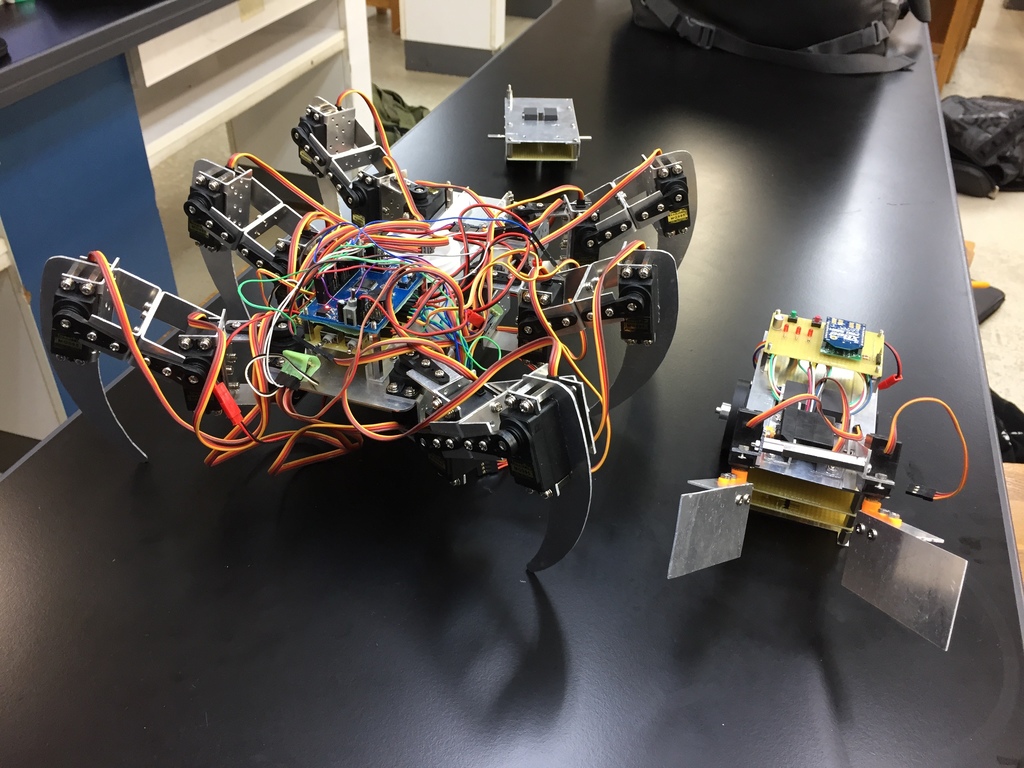
Multi-robots L:350mm * W:330mm * H:140mm, 2.3kg, 26mm/s Line-trace, Distance sensor, Vision sensor, Sensors using lightwave, Co-operation, Appeals: 六足歩行ロボットでは脚一つにつき三個のサーボモーターを六本で合計18個以上使っています。 この六本の脚によって全方位自由に歩く事が出来ます。 脚の制御では、逆運動学を用いて脚先の座標を指定するのみで簡単に脚を動かせるようにプログラムを書きました。 後ろ脚四本で車体を支え、残りの前脚二本でボールを掴むこともできます。 このロボットはカメラを積んでいて、車体後部にあるラズベリーパイ2でOpenCVを使用したプログラムによって画像認識をします。 移動時の誤差はカメラでラインを見る事で補正させています。 ちなみにこのロボットにはカメラ以外のセンサは積んでいません。 一応、このロボットで島の上に乗ってオブジェクトを認識する・・・予定です。予定。 あともしかしたらボールゾーンの上をワシャワシャ歩くかもしれません。 車輪型ロボットはなるべくコンパクトになるように設計しました。 車体下部にあるフォトリフレクタ4つでライントレースをします。 Characteristics: 六足歩行ロボット一台とコンパクトな車輪型ロボット二台の三台協調で動きます。 歩行ロボットに積まれたカメラでオブジェクトを認識し、ZigBeeを通して車輪型ロボットに位置を送りそのロボットでオブジェクトを回収してゴールへ運びます。 |