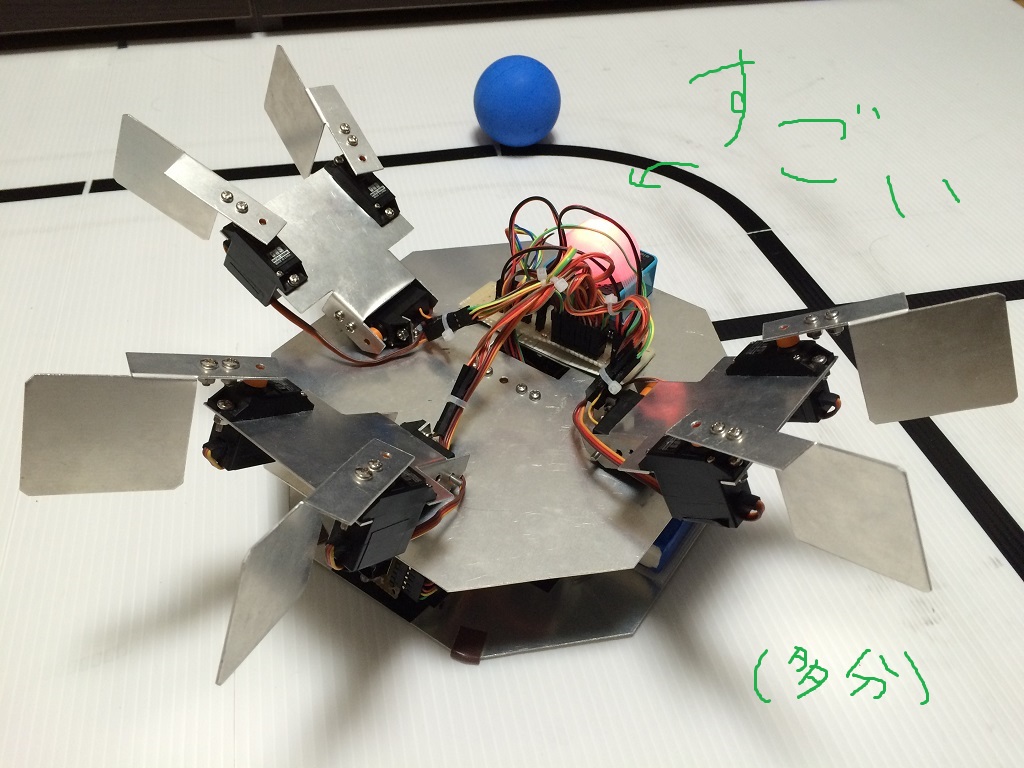
| 自立型,単独型 長200mm×幅200mm×高200mm, 重1.4kg, 速1000mm/s ライントレース, デッドレコニング, 距離センサ, ハンド, アピール くるくるします。ぴかぴかします。音を奏でます。あとボールを片付けます。 探索、ハンド、非貯めこみ、でも大掛かり過ぎないけど丁寧な動き型で全回収5分切りを狙ってみたのですが・・・ちょっとまだ修行が足りてません。 ロボットの特徴 # 足回り オリエンタルモーター社製42mm角ステッピングモーターにマイクロマウス用ホイールを 装着したもので構成された独立二輪機構の台車です。 底板が地面すれすれですので、従輪はカグスベールで代用されています。 # 回収機構 ## 腕 腕が3本。つまりママボールを3つずつ回収して収納することが出来ます。 これによりボールゾーンとゴールゾーンの往復回数が減り、ボール1個あたりの回収ペースは早くなります。 ## ターレット 腕が取り付けられているターレットは、本体に対して回転するので、ロボットがどこを向いたままでも、 前方への操作どの腕のが可能です。例えば、前を向いたまま左手でボールを回収することも出来ますし、 走りがけで前の手のボールを右に放り投げることで収納することも出来ます。 これにより、車体を回転させる時間を短縮できるので回収ペースを上げる助けとなります。 ちなみに、ターレットと本体の分離および取り付けは径のあっているプラスドライバーひとつあれば、 20秒で行えるように作られているので、他人に機構を自慢する際に、とても便利になっています。 # センサー ## ボール発見センサー CMOS測距センサーを3つ使用し、60度回転するだけで180度を見渡すことが出来ます。 これにより、ボール探索1回あたりの時間を1/3に減らすことが出来ます。 ## カラーセンサー ボール照射に高輝度白色LED、受光に浜松ホトニクス製のデジタルカラーセンサーS9706を使用しました。 RGB情報を取得し、HSV情報に変換した上で色相で判断し、かなり正確にボールの色分けが出来ます。 ## ライントレース用フォトリフレクタ回路 このロボットではステッピングモーターを使用しているので、フィードバックなしでも それなりに位置決めができます。しかし誤差はどのようにしても生じるので、 このロボットではライントレースをして誤差を解消しています。 # アピールチャンス ## フルカラーLED フルカラーLEDがロボットの後部についています。 ロボットの内部状態によって色んな色になります。 ## スピーカー MIDIっぽく矩形波を流せるできるスピーカーがついています。 いろいろ出来ますが、余力があればいろいろ実装する予定です(予定です)。 |