れもん(れもん)
電通太郎(電通太郎)
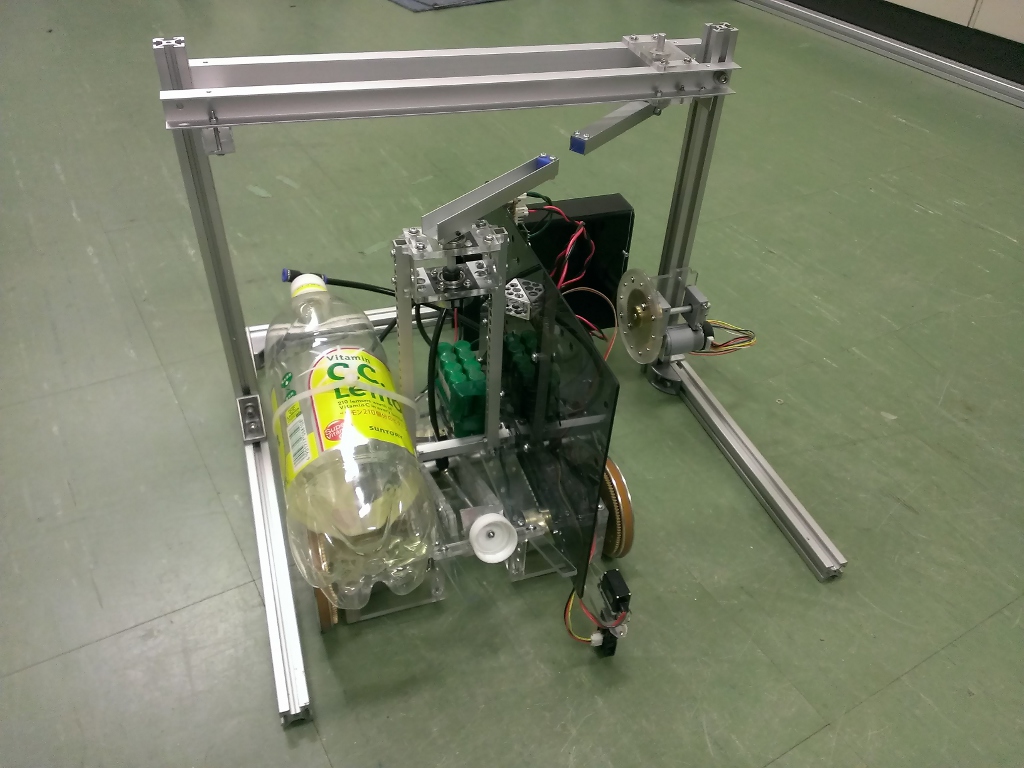
大阪電気通信大学 鄭研究室
自立型,複数型
長445mm×幅445mm×高350mm, 重4.4kg, 速150mm/s
デッドレコニング, 距離センサ,
ハンド,
アピール
フィールドのラインに頼らない自己位置推定の手法の実現をがんばります。
ロボットの特徴
スタートゾーンから張った糸で自己位置推定を行います。これをオドメトリと組み合わせることで確実な自己位置推定を試みます。ボールをエアシリンダでゴールへ飛ばすことで時間短縮を狙います。
競技結果:
一次 競技点: 26.00 審査点: --- 補正: 0 合計:26.00 パ: --- チャ: --- 芸:--- 速:---
二次 競技点: 36.00 審査点: 34.34 補正: 0 合計:70.34 パ: 15.00 チャ: 7.34 芸:5.34 速:6.67
決勝 競技点: 38.00 審査点: 38.25 補正: 0 合計:76.25 パ: 16.00 チャ: 8.50 芸:6.50 速:7.25