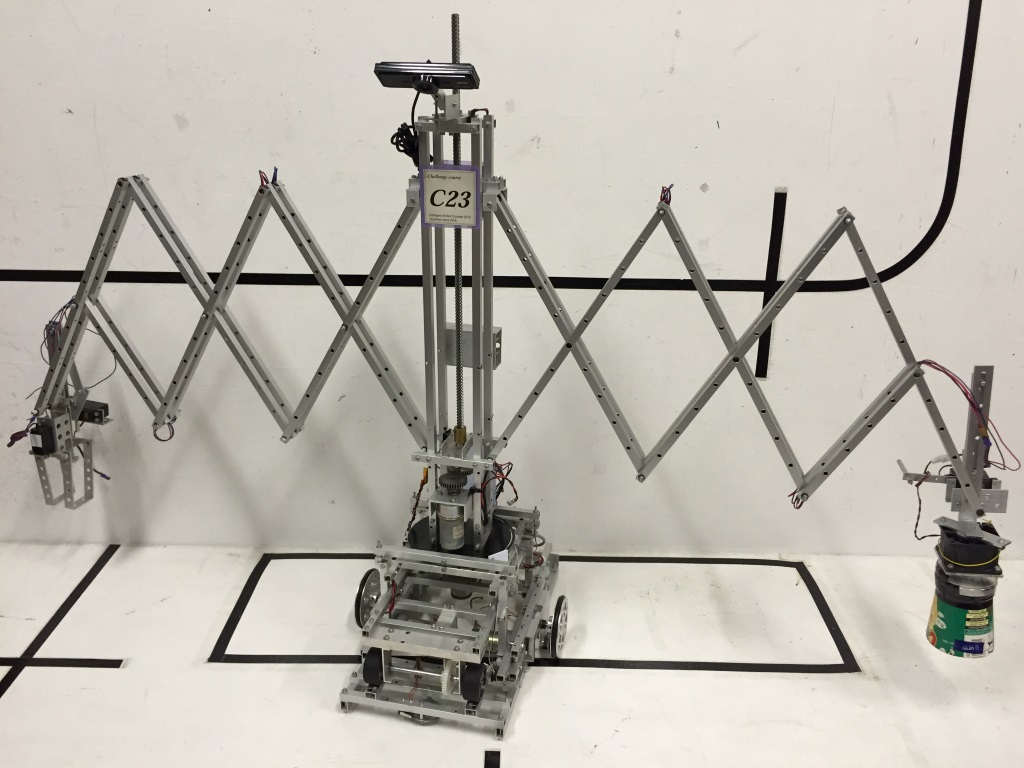
| 自立型,分離合体型 長400mm×幅300mm×高850mm, 重5kg, 速100mm/s ライントレース, ビジョンセンサ, ハンド, 風, アピール 本ロボットは,3年前に出場した「RAPHAEL」の後継機であり,当時は実現できなかった「ボールの両手持ち」「無限回転」「カメラ制御」に挑戦している. 競技台を飛び出す程に伸びたアームは迫力十分. ロボットの特徴 車輪型ロボットがアームロボットを運搬し,アームロボットは中央段差に上陸する. アームロボットは上陸位置から移動することはなく,アームを伸縮・旋回させることでのみボールを取得する. また,アームロボットの上端に設置したwebカメラを使用してボールの位置や色情報を得る. ケーブルを排除することで旋回の制限を無くしている. |