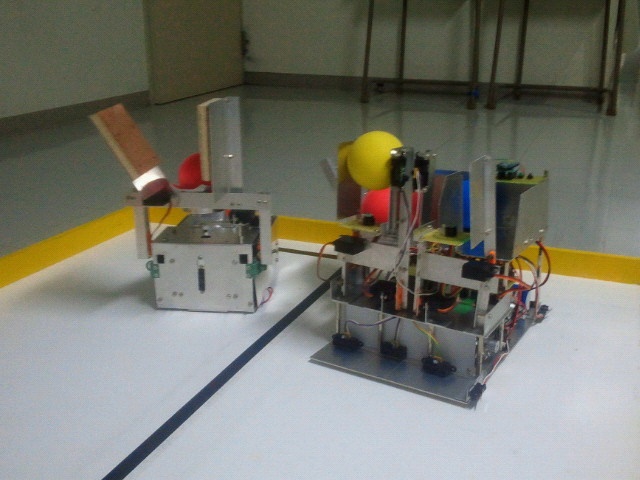
| 自立型,複数型 長290mm×幅280mm×高260mm, 重3.333kg, 速600mm/s 距離センサ, 協調動作, ハンド, アピール 2台ともアルミの板をベースにしていますが、構造は全く異なっています。見た目は違っても、協調でスムーズな動きができたら良いなと思います。 ただし、もし仮に当日、一方のロボットの調子が悪くなっても、もう一方のロボットである程度得点をとれるようにしています。 また、当日までに間に合えば、中2の班員が作っている、自由ボールを落とすためのロボットも走らせるかもしれません。 ロボットの特徴 複数台協調です。手分けしてボールを回収していきます。 1台は、メカナムホイールを使い、回転することなく縦横無尽に走り回ります。アームは左右二つあり、アームの先端に横向きの距離センサーを取り付けてあるので、直進するだけでボールを探すことができます。4つ(運が良ければ最大6つ)のボールを同時に運ぶことができます。 もう1台は、シンプルに、アームでボールを掴み、持ち上げ、色分けをして、ゴールに運びます。3つのボールを同時に運べます。車体を覆う薄い装甲も、このロボットの特徴の一つです。 |