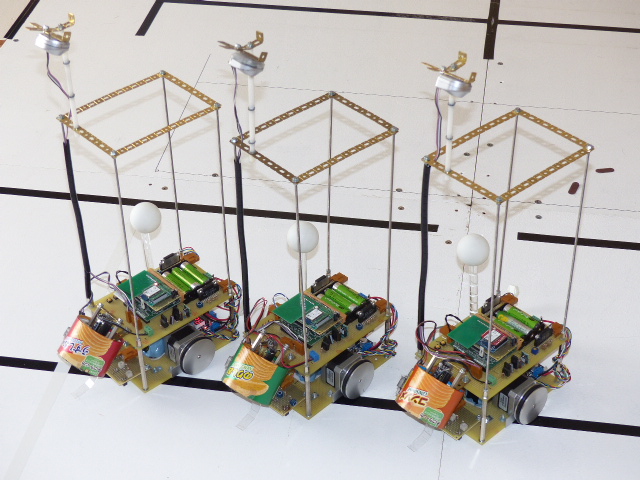
| 自立型,複数型 長250mm×幅150mm×高510mm, 重1.5kg, 速700mm/s ライントレース, ビジョンセンサ, 協調動作, 風, アピール ・ボール取得にハンド等可動部を伴う仕組みを排除し、吸引機構のみで取得・保持・投棄を行うことにより競技時間の短縮が図れた。 ・一台当たりの制作で行った切断を伴う金属加工は、モーターマウント用のL字アングルで3回のみ。あとはカッター、ハンドドリルで加工。 ・一台当たりの製作費も2万数千円程度で制作することができた。 ロボットの特徴 ライン認識:フォトインタラプタによるラインセンサ。一部カメラによる画像認識。 ボール探索:カメラによる画像認識。 ボール取得:ファンによる吸引。 |