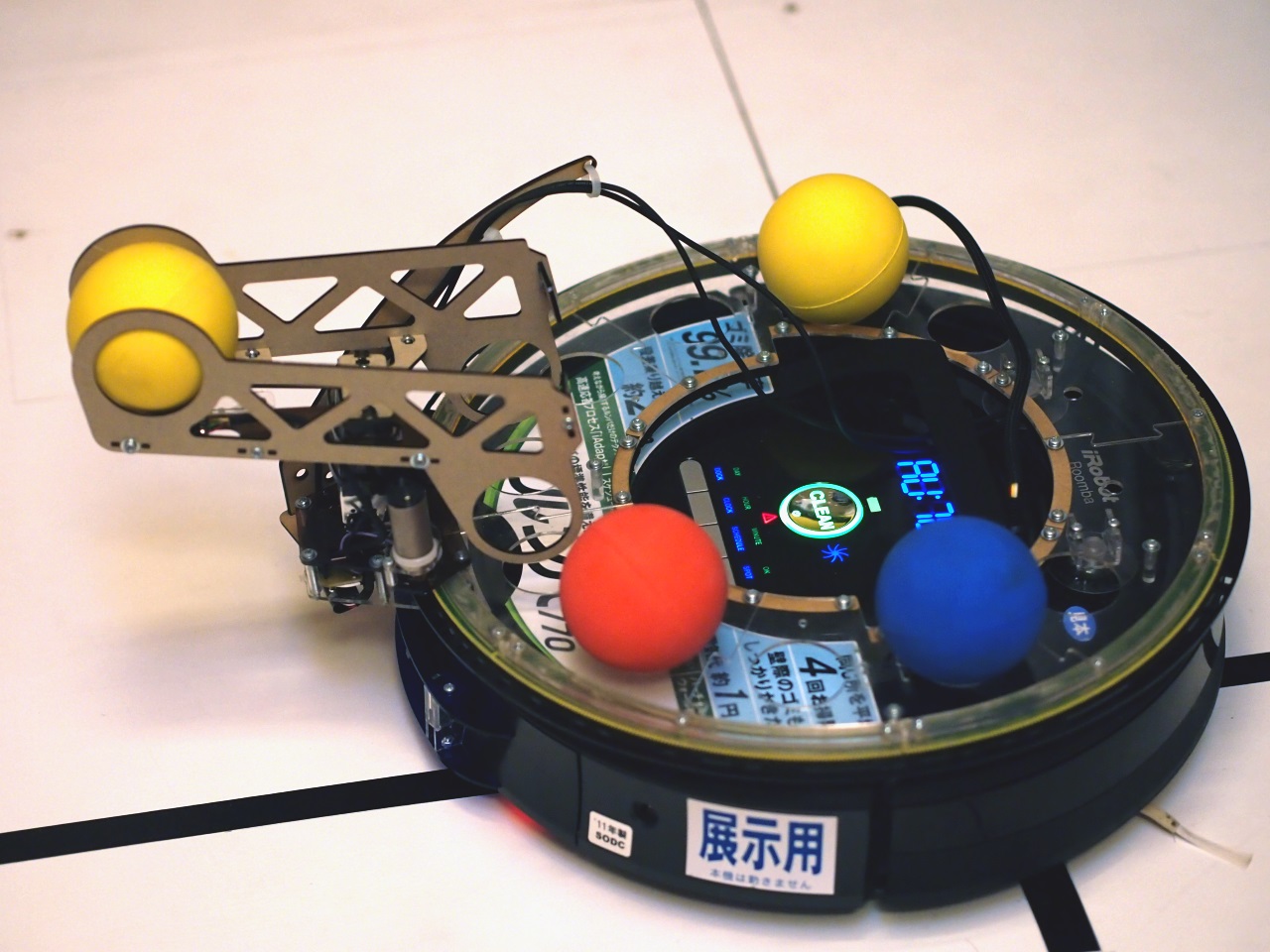
| 自立型,単独型 長430mm×幅430mm×高230mm, 重4kg, 速300mm/s ライントレース, デッドレコニング, 距離センサ, 光センサ, ハンド, アピール ・ルンバを最大限活用することで機械加工を最小限に抑え、製作期間の大幅短縮を実現しました(?) ・メインの制御基板等をルンバ本体内に収めたり、透明のアクリルを活用したりして、見た目に配慮しました。 ロボットの特徴 複数個のボールを載せて運ぶタイプのロボットです。 ボールを拾うと、アームがロボットの外周を移動し、ロボット上の所定の位置にボールを置きます。この時にどの場所にどの色のボールを置いたかを記憶しておくことで、正しいゴールへ投入することができます。 アームの移動のための位置センサとして、アブソリュートなエンコーダを自作しています。これにより、電源投入時のアーム位置のキャリブレーションが不要となっています。 |