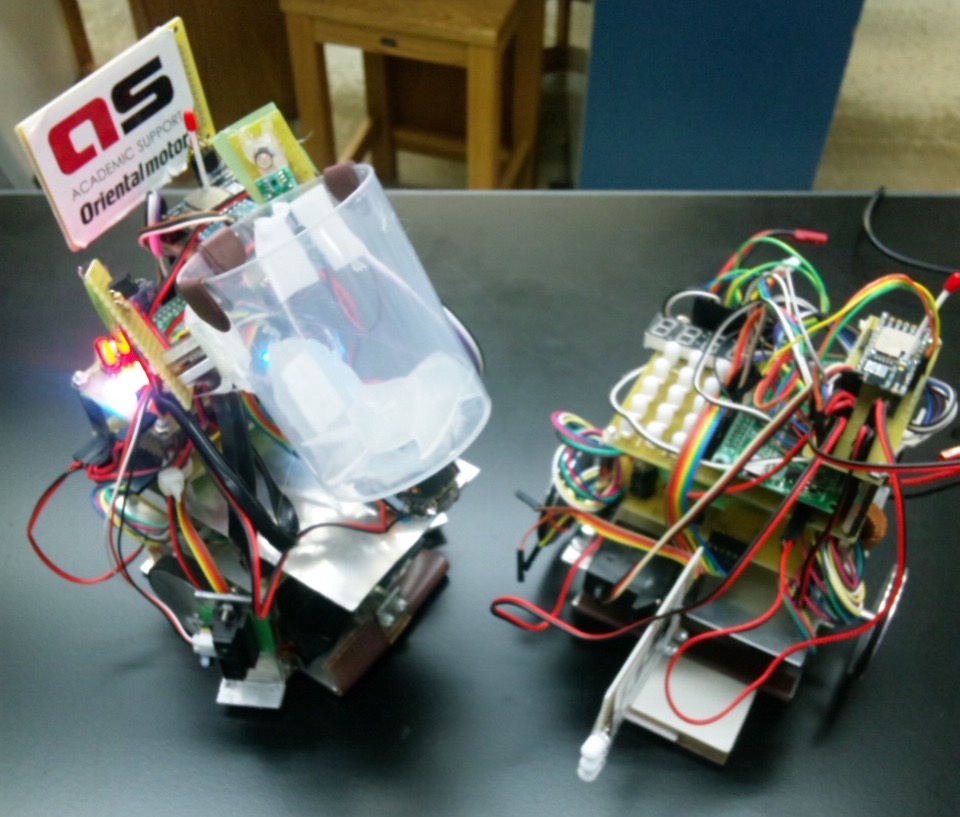
| 自立型,複数型 長120mm×幅100mm×高150mm, 重1.3kg, 速1000mm/s ライントレース, デッドレコニング, 距離センサ, 光センサ, 協調動作, 風, アピール ボールを集める「山田君3号改」と、情報特化の「山田君4号」の2台協調です。今年のものづくりチャレンジイン習志野で、技術賞を頂いた機体です。そこから、更に改良を加え、1台増やしました。メンバーは高校3年生から中学2年生までで、高校1年生が中心となって作っています。今年は細かいところまで作り込み、動作の正確さ、そして速さをあげられるように、調整をしました。満足のいく動きが出来るように、頑張ります。 ロボットの特徴 ボールを取る機体と、情報を表示する機体の2台協調です。ボールを取る機体は、1台でボールを1つずつしか運ぶことが出来ませんが、小型ロボットならではの素早いライントレースや、測距センサを3つ用いた探索、吸引機構といった工夫により、正確に、速くボールを集めることが可能です。また、ロボットに非接触でモードを変えることが出来ることや、探索の重み付けというような、ソフトウェアも工夫しています。もう1台は情報表示に特化しています。昨年の知能ロボコンの景品で頂いたRX621マイコンボードを使い、40個以上もあるLEDを、自在に制御します。残り時間の表示など、調整の際にも、役割を果たしています。また、2台は違うマイコンを用いていますが、通信を行います。2台とも小型なので、持ち運びが楽です。 |