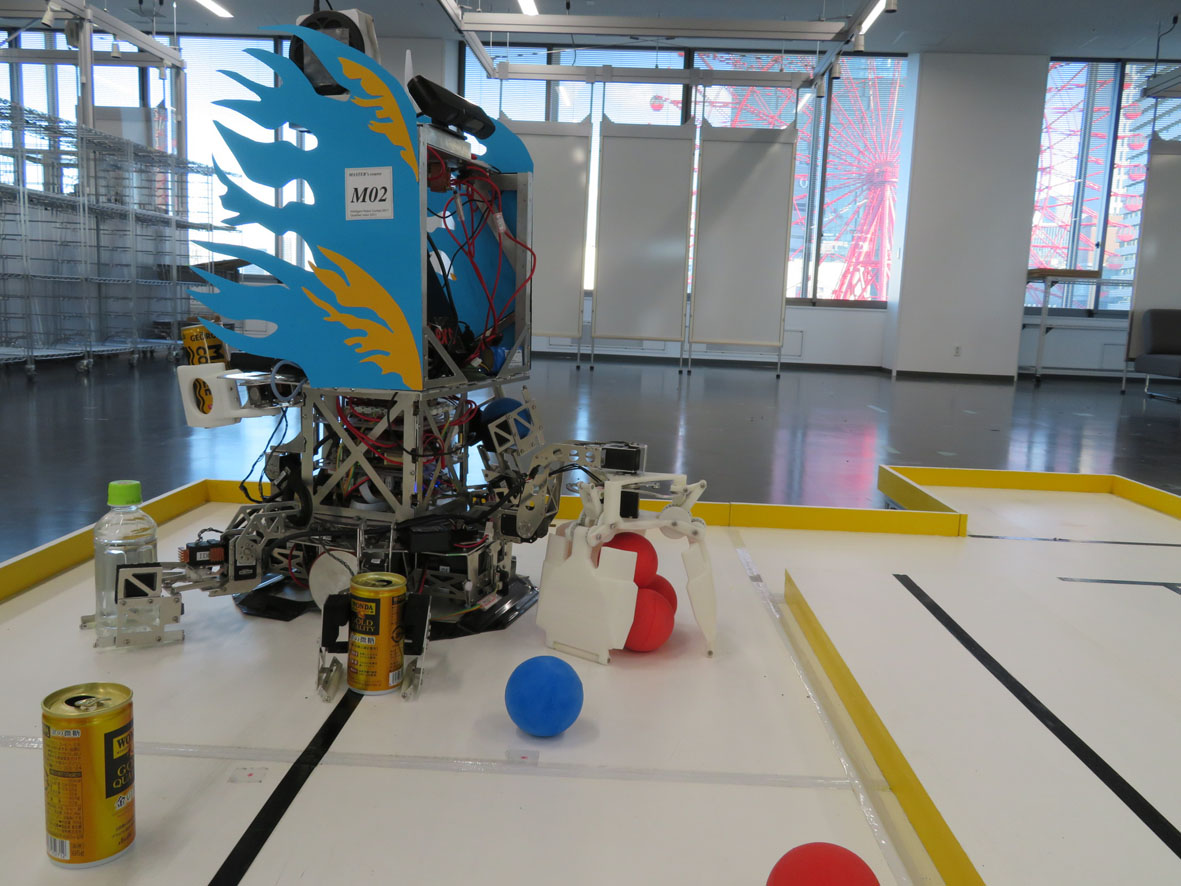
| 自立型,単独型 長448mm×幅448mm×高617mm, 重10.5kg, 速1000mm/s デッドレコニング, 距離センサ, ビジョンセンサ, ハンド, アピール すべての対象物に対応可能な完全制覇を可能にする唯一無二のロボット! (NeW) 缶の向き推定,ボールピラミッドの向き推定 (New) が可能! 3Dプリンタで作成した変形するボールピラミッド用スペシャルハンド! (New: 向きを合わせてとる) 場面に応じて,話す,鳴らす! 移動する際の誤差はPSDセンサを用いた自己位置補正で修正します.これによりライントレースをすることなく,動き回ることが可能です. ロボットの特徴 RGB-Dカメラを用いた物体の判別,3次元の点群データを用いて,ボールと缶の形状を判別し,色情報を用いて,色を判別します. RGB-Dカメラから対象物の数,位置等が一度に取得可能です.複数の判断基準(例えば,物体までの距離)から最適な経路を生成して,物体を回収します.物体の特徴に合わせた6本のアームを使用することで,全ての物体において回収することを可能とします. |