雷瀬(雷瀬)
Takahashi Lab.A(Takahashi Lab.A)
福島大学 高橋研究室
自立型,単独型
長350mm×幅250mm×高430mm, 重5kg, 速600mm/s
ライントレース, デッドレコニング, 距離センサ,
光センサ, ローラ,
アピール
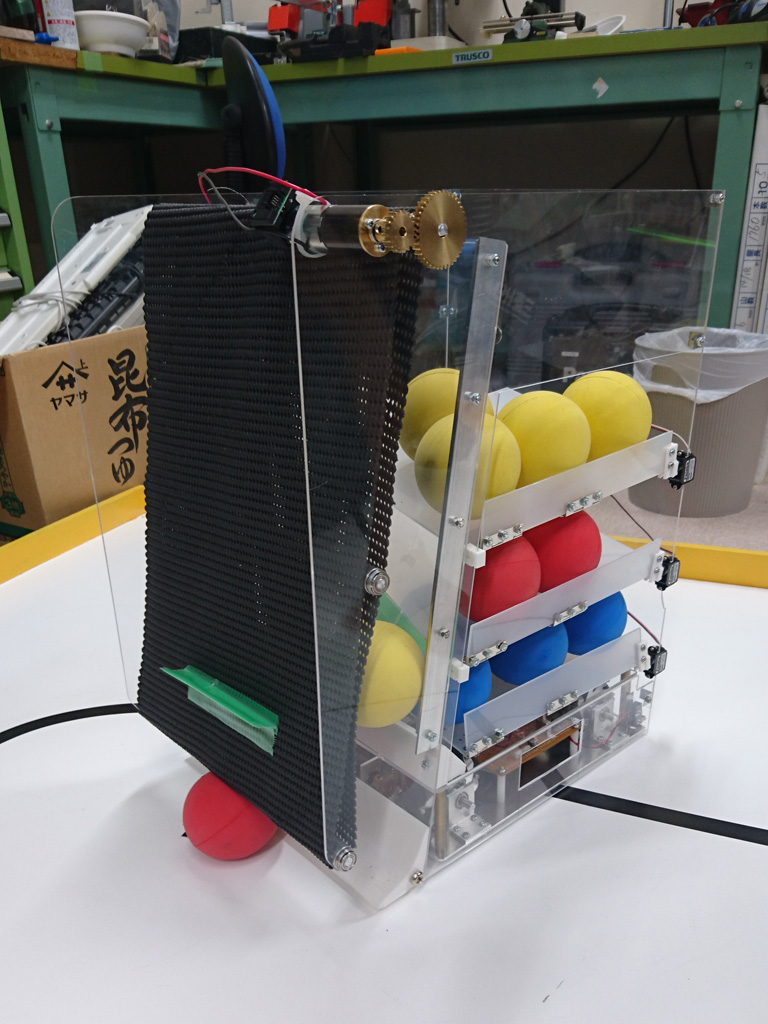
4輪にしては小さくまとめました(台車部) 色を仕分ける動きが面白いので注目してください。
ロボットの特徴
メカナムホイールを用いた全方向移動です。 ベルトコンベアでボールを吸い込み、上部にある仕分け機構(サーボモータ)によって色ごとに仕分けます。 ロボット内部の3か所にボールを貯め、ゴールに排出します。
競技結果:
一次 競技点: 12.00 審査点: --- 補正: --- 合計:12.00 パ: --- チャ: --- 芸:--- 速:---
敗復 競技点: 47.00 審査点: --- 補正: --- 合計:47.00 パ: --- チャ: --- 芸:--- 速:---
二次 競技点: 50.00 審査点: 38.34 補正: --- 合計:88.34 パ: 16.00 チャ: 7.00 芸:8.00 速:7.34
決勝 競技点: 50.00 審査点: 38.67 補正: --- 合計:88.67 パ: 16.00 チャ: 8.00 芸:7.34 速:7.34