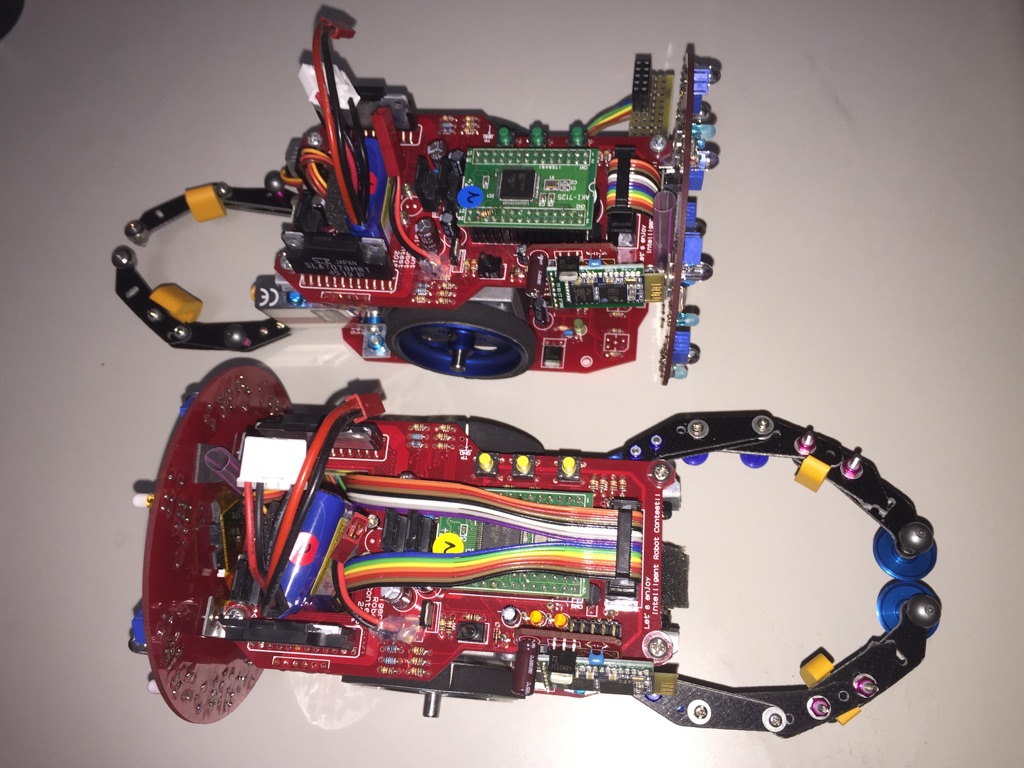
| 自立型,複数型 長200mm×幅100mm×高100mm, 重0.6kg, 速1024mm/s ライントレース, デッドレコニング, 距離センサ, 光センサ, 協調動作, ハンド, アピール ・同じ機能を持つ2台のロボットを無線通信で協調動作。 ・対象物(ボール、缶、ウォーターボトル)は機体前方/後方の丸い基板につけた6個のデジタルセンサを使って高さと幅を認識して判断。 ・重量の重いウォーターボトルは2台が協力して運搬(予定) ・出番のない機能の回路をこまめにOFFすることで省エネを目指した。 ・ジャイロセンサで自己位置推定の精度向上を狙った ロボットの特徴 ・メカ機構はシンプルにアーム2本のみ ・真っ赤な自作基板 ・きれいな加減速 |