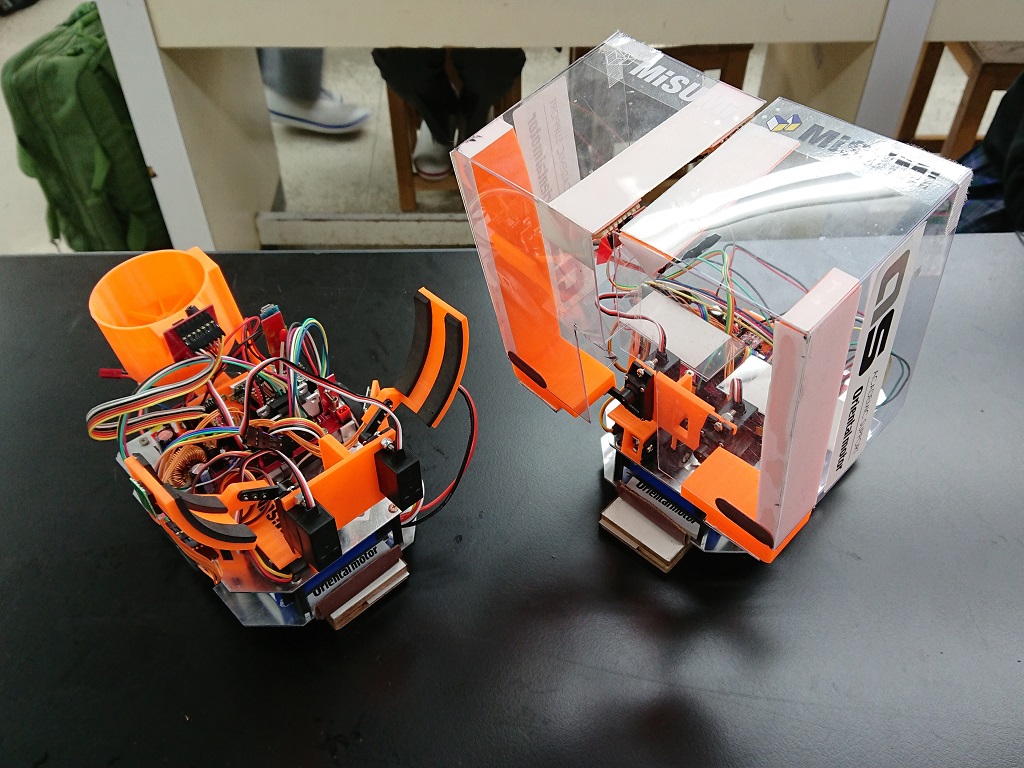
| 自立型,複数型 長150mm×幅120mm×高80mm, 重1.4kg, 速300mm/s ライントレース, デッドレコニング, 距離センサ, 光センサ, 協調動作, ハンド, 風, アピール マスターズ初参戦ですが、チャレンジャーズで得た知見や新技術で挑戦します。ハンド、吸引、3Dプリント部品、ジャイロセンサ、プリント基板、2台協調などなどさまざまな技術でオブジェクトを正確にとっていけるように頑張ります。また、車体の部品として、昨年の知能ロボコンでいただいた、オリエンタルモーターさんのステッピングモーター、株式会社日南さんのアルミ削り出しモーターブラケットや、ミスミ学生ものづくり支援の部品を活用させていただいています。ありがとうございます。 ロボットの特徴 ボール、立っている缶、ペットボトルを運ぶ「山田君5号」と、倒れている缶、ピラミッドを取る「山田君6号」の2台協調です。ハード面では初めて3Dプリンターを使用して、各種部品を作成しました。また、モーターブラケットに日南さんからのアルミ削り出し部品を使うことで、高精度でしっかりした足回りが組めました。さらに、今年からジャイロセンサを用いて角度を検出できるようにしたことで、比較的少ない調整で路面の影響を受けにくい動きができるようになっています。ソフトウェア側も、探索の範囲を三角関数を用いて長方形にしたり、ステッピングモーターとジャイロセンサを組み合わせた制御を行ったりと工夫しています。またプリント基板を自作したことと、3DCADで機体を設計したことにより、マスターズの中では小型な機体になりました。持ち運びの際に便利です。 |