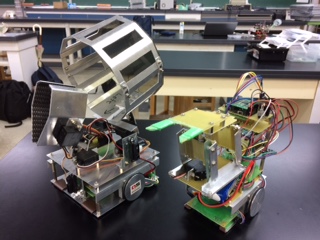
| 自立型,複数型 長220mm×幅165mm×高300mm, 重1.4kg, 速500mm/s ライントレース, デッドレコニング, 距離センサ, 光センサ, ハンド, アピール 早い段階で車体を走行可能にし、実際に走らせながらの調整に時間をかけて終始安定感のある動作を目指しました。特にライントレースはかなり安定し、コーナーも滑らかに曲がれるようになっていると思います。 ロボットの特徴 移動は赤外線センサーを用いたライントレース、対象物の検出は測距センサーで行います。ボール・立った缶は前方の小アーム、ピラミッド・倒れた缶は後方の大アーム、ペットボトルは専用の2台目のロボットで回収します。 |