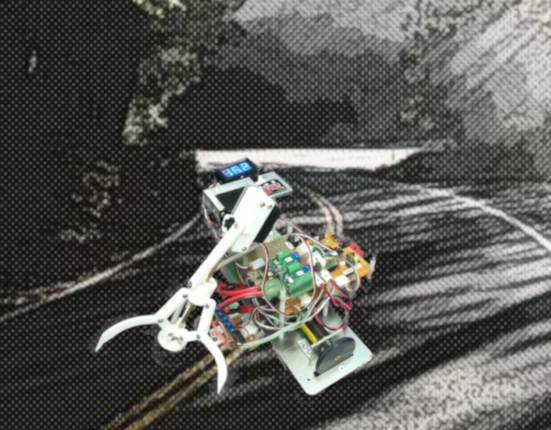
| 自立型,複数型 長250mm×幅250mm×高200mm, 重1.5kg, 速---mm/s ライントレース, デッドレコニング, 距離センサ, 光センサ, ハンド, アピール ボールの拾い方、捨て方の美しさを追求します。 片側1車線の公道(競技台)で、センターライン(テープ)ギリギリの最速ドリフトを! ロボットの特徴 ボール回収ロボットとボール入れロボットでの協調動作を行います。 回収は、軽量化を図ったアームに搭載した3つ爪ハンドで行います。 PD制御によるライントレース、オドメトリ、距離センサを用いて周囲情報を正確に把握し、ロボットの走行を安定させています。 |