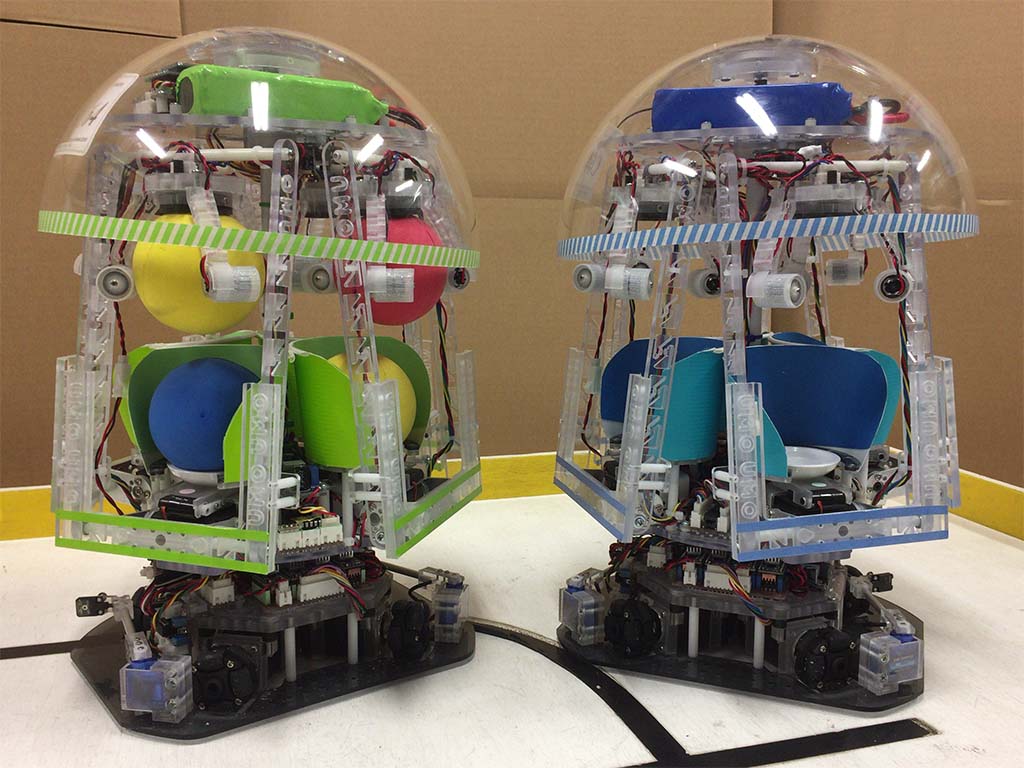
| 自立型,複数型 長260mm×幅260mm×高386mm, 重8.2kg, 速200mm/s デッドレコニング, 光センサ, 協調動作, ローラ, アピール 頭のドームが上がって、腕が出てきます。ボールを運ぶときはドームを降ろしてボールを体内に格納します。見た目可愛いです。 ロボットの特徴 ボールを見つけると、長い腕を出して指先のローラで吸い取ります。吸い取ったボールは、ロボット内におけるので、もう一個のボールが取れます。この腕が4本あって、腕のある頭(腕)の部分がぐるぐる360°以上何回も回れるので、一度に8個まで、ボールを回収してゴールすることが可能です。2機連携(仕事分担)です。 |