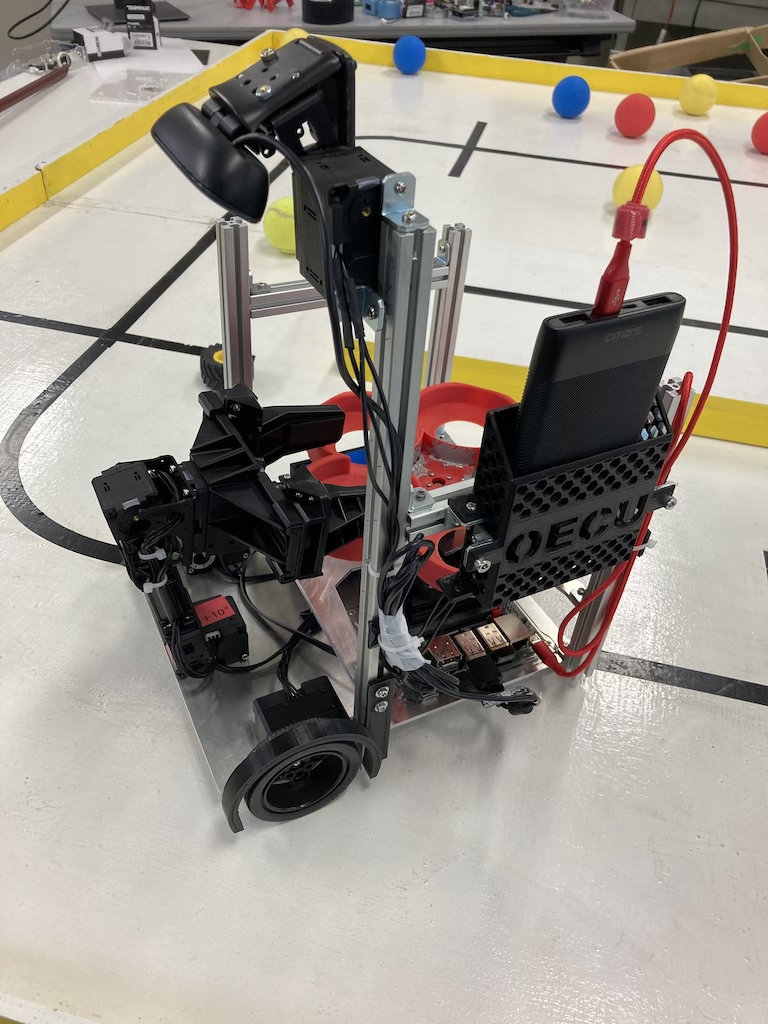
| 自立型,単独型 長250mm×幅250mm×高255mm, 重2.7kg, 速---mm/s ライントレース, ビジョンセンサ, ハンド, アピール この機体は画像処理を最大限活用して全てのタスクを画像処理によってクリアすることをテーマとしており,その為カメラ以外のセンサーを一切搭載していません. そのおかげで,回路設計を行う必要がなくなり,従来よりもスピーディーに機体を製作することができました. ロボットの特徴 カメラの映像を2値化することによって黒線を認識し,黒線の重心座標をもとにPID制御によってライントレースを行い移動します. ボールの認識に関しては,ハフ関数を用いてカメラの映像から円を切り抜き,切り抜いた部分を色認識にかけることで,ボールの座標と色を認識し,アームによってボールを掴み,機体上方の回転式の台に乗せることで回収します. |