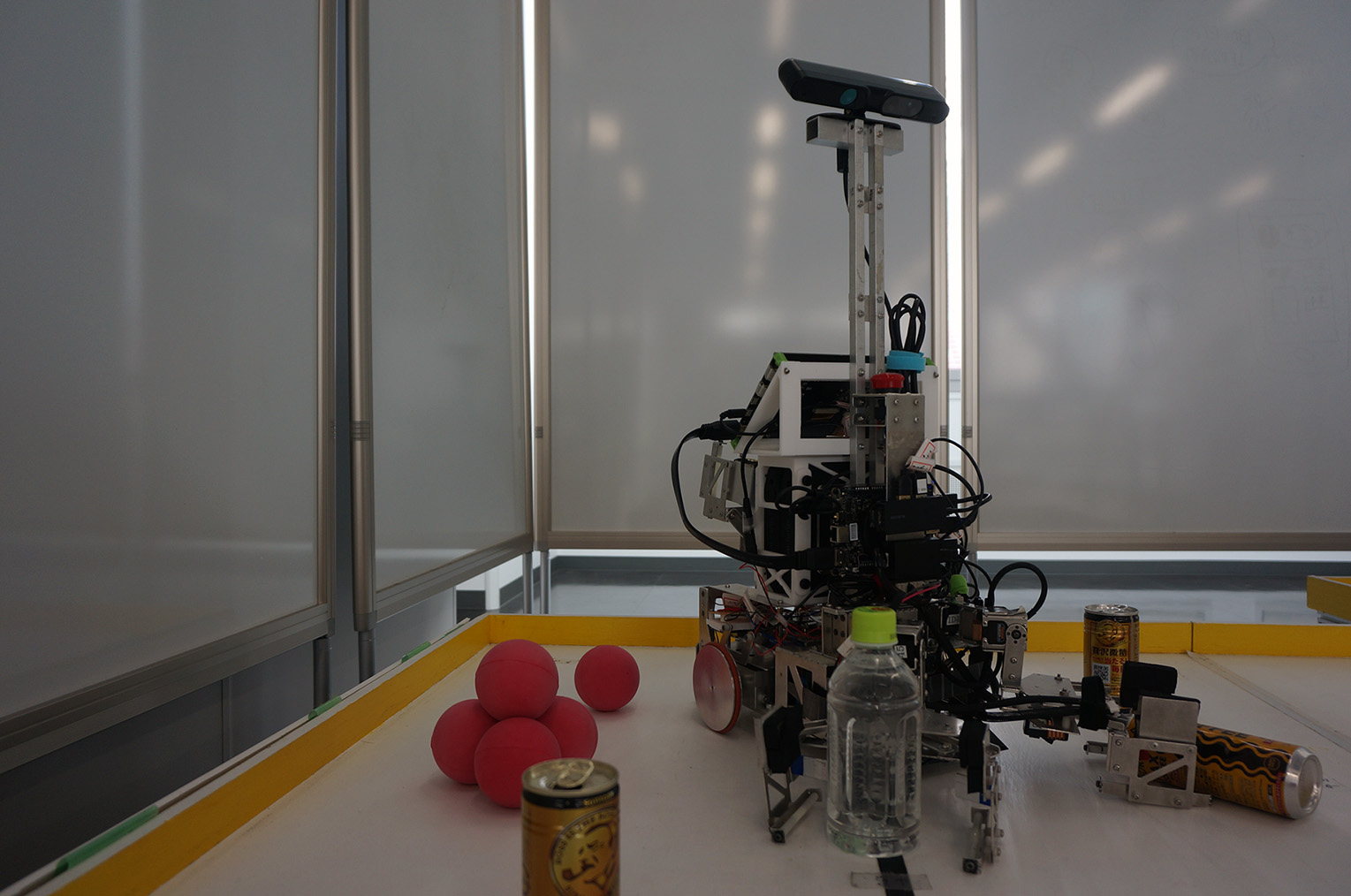
| 自立型,単独型 長410mm×幅320mm×高636mm, 重5.7kg, 速4000mm/s デッドレコニング, 距離センサ, ビジョンセンサ, ハンド, アピール 知ロボ初!?の完全ROS化ロボット,システムをすべて0から作りなおしました. シミレーション環境で事前に動きを作成し,実機で検証することでコロナ禍でも円滑な開発を可能にしました. ロボットの特徴 技術の無駄遣いその1: ROSを採用しましたが,知ロボの競技台は特徴点が少なく,LRFでは十分な自己位置推定が困難なことがわかりました. 一見過去のロボットと同じような動きに見えますが,中身はまったくの別物(大変な労力)です. 技術の無駄遣いその2: ライントレースは使用せず,オドメトリと距離センサによる自己位置修正による移動を実現しています. スペック上は4 m/sの速度で走行可能ですが,競技台が狭くて速度を落としています. |