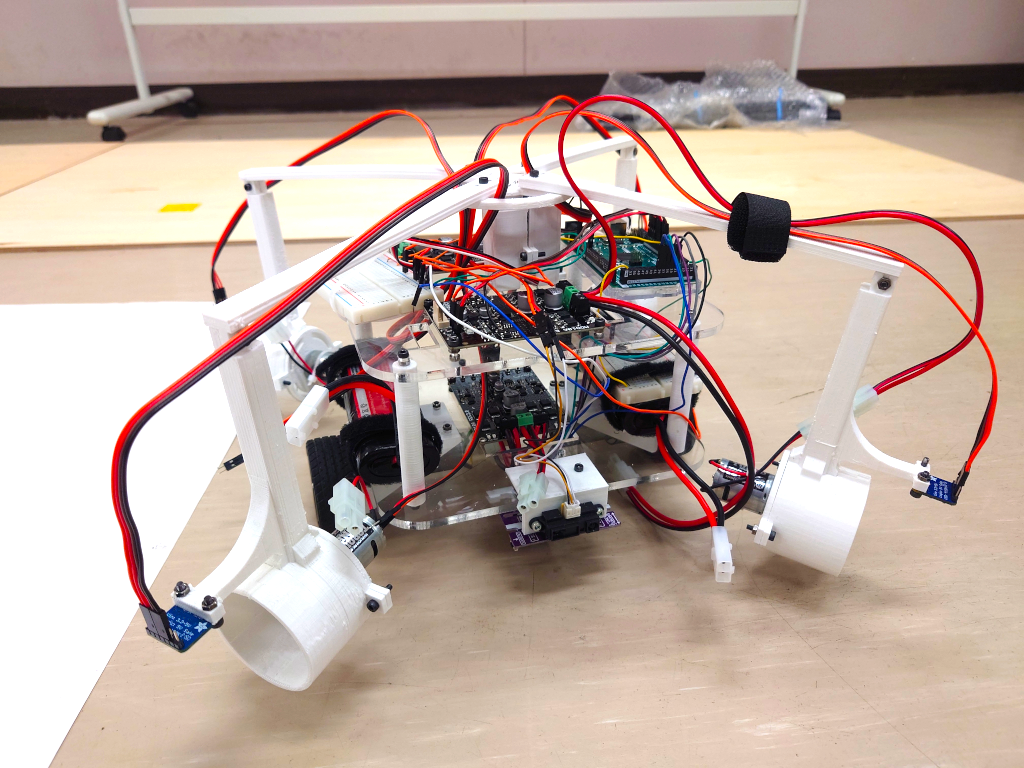
| 自立型,単独型 長500mm×幅500mm×高200mm, 重2.7kg, 速750mm/s ライントレース, 距離センサ, 光センサ, 風, アピール 機体のほとんどが3Dプリンターやレーザーカッターで制作されています。 ロボットの特徴 ライントレースしてコースを進み、赤外線センサーでコース上のボールを認識します。プロペラが仕込まれた筒状の回収機構(以下、吸引機とする)でボールを吸引することでボールを取ります。メリーゴーランドのように機体周りに取り付けられた吸引機を回転させることで最大4つまでボールを取ることができます。吸引機の先に付いたカラーセンサーでボールの色を認識し、ボールの色ごとにゴールへ運びます。 |