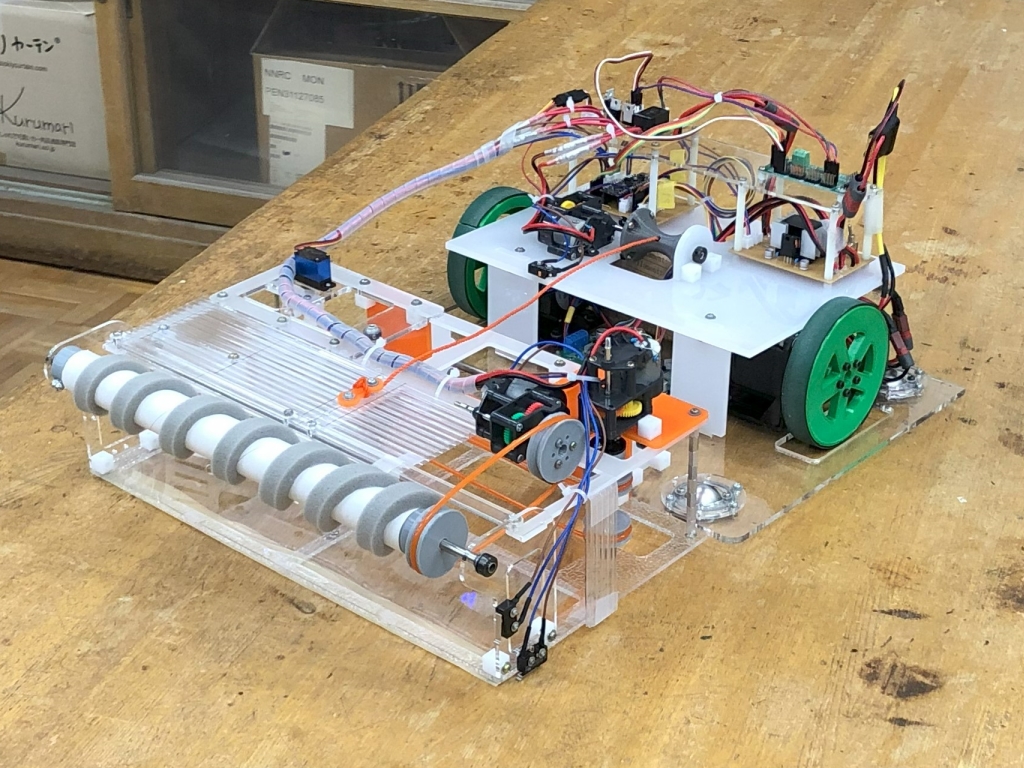
| 自立型,単独型 長390mm×幅270mm×高270mm, 重5.08kg, 速50mm/s ライントレース, 光センサ, ローラ, ハンド, アピール 全体的に簡単な仕組みですが、取得・排出機構については工夫をこらしています。ぜひ、HAYATEがボールを吸い込み、吐き出す瞬間を見ていただけたらと思います。 ロボットの特徴 基本的な動作は、ローラでボールをかごの中に回収し、かごを引き上げます。そのあと、かご内部のコンベアで運搬、サーボモータによるハンドで横から1個ずつ排出します。センサーはスイッチによる壁ドン手法。足回りはステッピングモーターを使用しています。 |