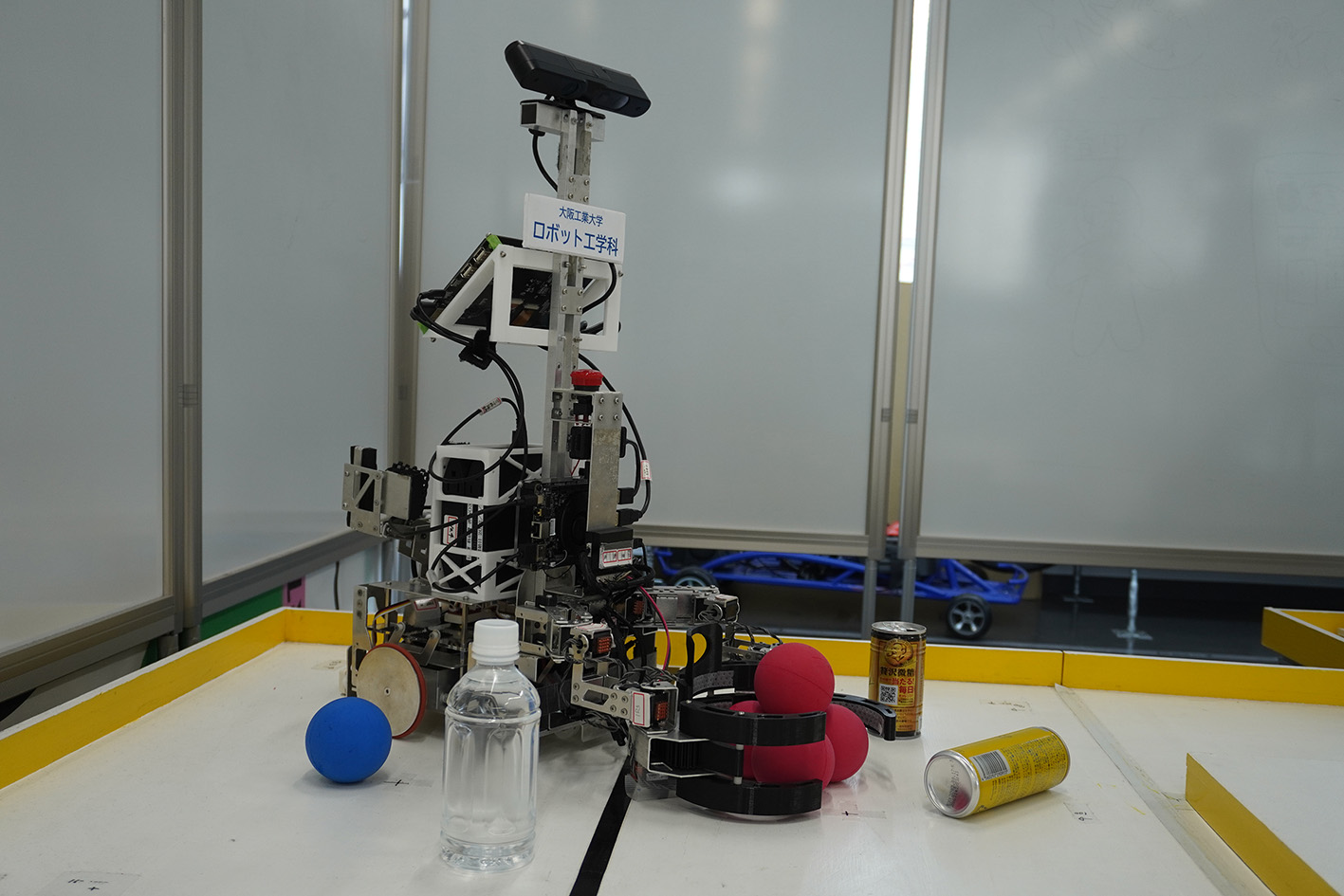
| 自立型,単独型 長450mm×幅350mm×高625mm, 重6.0kg, 速4000mm/s デッドレコニング, 距離センサ, ビジョンセンサ, ハンド, アピール これら複雑なシステムをバランスよく実装することが難しいです. ロボットの特徴 双腕平行リンク機構のアームでボールピラミッドをつかみます. ボールや缶は,それぞれ左右のアームでつかみます. ペットボトルは尻尾アームでつかみます.ここだけ高トルクサーボ(Dynamixel)を実装しています. ボールピラミッドをつかむのは決勝で. ロボットはROSで全体を制御をしています.物体認識は,RGB-Dセンサを用いて形状と色情報から物体を判別しています. ロボットの自己位置推定は,ライントレースを用いない高度な方法を使用しています.具体的には,壁までの距離をToFセンサ(安全なレーザ)で測定しています.PSD距離センサは,壁から近い位置でしか使用できませんが,このToFセンサを使用するとより遠くでも用いることが可能になります. |