おかげさまで、無事終了いたしました。
仙台市科学館エントランスホールは、多数の来場者及びギャラリーで賑わいました!
「ロボコンジュニア2006」の結果は、以下のとおりです。ご参加いただいた皆様、ご協力いただいた皆様、ありがとうございました。
※ 当日は沢山の参加者に恵まれ何かと不行き届きだった点もあろうかと思います。
この場を借りて、お詫びいたします。
◎ ジャストストップ部門 入賞者 ◎
1位 多賀城市立八幡小学校 4年 斎藤 英怜 0.16 2位 仙台市立東四郎丸小学校 6年 笹谷 祥平 0.27 3位 仙台市立小松島小学校 5年 小野寺 理玖 0.96 4位 多賀城市立八幡小学校 2年 浅田 将斗 1.03 5位 多賀城市立八幡小学校 4年 浅田 将希 1.45 6位 福島市立松川小学校 5年 渡辺 健登 1.65 7位 仙台市立鶴ヶ谷小学校 3年 小山 慶太 2.15 8位 仙台市立東四郎丸小学校 6年 伊深 大 2.36
◎ ダンプ・リターン 入賞者 ◎
1位 仙台市立将監中央小学校 6年 今林 啓輔 16.95 2位 仙台市立上杉山通小学校 5年 金井 愁真 30.62 3位 仙台市立黒松小学校 6年 鵜川 由似 33.61 4位 仙台市立中野小学校 5年 阿部 健太 35.35
◎ パフォーマンス部門 入賞者 ◎
最優秀賞 仙台市立東四郎丸小学校 伊深 大 癒し賞 一般参加 安達 泉 < エントリー数:39名 >
<ロボコンジュニア2006 大会の模様>
■日時:2006年6月24日(土) 会場 : 仙台市科学館
※ ロボコンジュニアは6月24日〜25日に開催されるロボットコンテストフェスティバルの中のひとつのコンテストとして開催されます。
■参加資格:小・中学生(パフォーマンス部門には、年齢制限がありません。) ■参 加 費: 無 料 (ただし「ロボット教室」に参加する場合は、別途梵天丸キット代金が必要)
【共通事項】
・ 競技は、「ジャストストップ」、「ダンプ・リターン」及び「パフォーマンス」に分かれます。
・ ロボットは自分で判断して動く「自律型」のみとします。
したがって、競技者は、スタートの指示以外は、競技中にロボットにふれたり、リモコンで操作してはいけません。
・ ロボットが、競技台上の障害物や壁を移動・破壊した場合は、失格扱い(無記録)とします。
【各部門別ルール】
ジャストストップ(初級者競技: 小・中学生競技 )
梵天丸をスタートラインからスタートして奥の壁まで直進して壁を感知し180度回転ふたたびスタートラインまで戻って止まる競技です。
できるだけゴールライン(スタートライン)ぴったりに止まるとともに、規定時間(30秒)ちょうどに止まるほど成績が上位になります。
スタートしてから規定時間を目標にしてゴールするまでの時間と、ゴールしてから止まるまでどのくらいの距離を走ったかを測って合計点数で順位を決めます。
◎スタートのしかた
競技者が直接電源を入れるか、リモコンを使い(梵天丸に手を触れないで)、スタートさせます。
スタート時は、梵天丸のすべての部分がスタートラインの手前にあることとします。
◎時間のはかり方
スタートラインに光センサーを使った計測装置を置いて、審判員がスタートしてからゴールするまでの時間を測ります。時間は、規定時間(30秒)からの差分時間を1/100秒まで計ります。
◎距離のはかり方
ゴールしてからどの位走ったかを審判員がセンチ単位で測ります。計測は、ゴールライン(スタートライン)の外側(畳のふち側)から梵天丸の先端中央(センサの前)の下にスケールを垂直に当てて測ります。
計測にあたっては、ゴールラインの外側に1センチ刻みに線を引いておき、その距離を測ります。1センチに達しない場合は、切り捨てとします。(例:10.7cmは、10cmとする)
◎Uターンラインの通過
梵天丸は、必ずUターンラインを通過してからUターンしなくてはなりません。Uターンゾーンの通過確認は、光センサーによって行います。
◎順位の決定について
競技回数は、最大3回とします。失敗した場合は、試合時間内であれば何度でも挑戦できますが、3回成功した後の挑戦は、当日の状況(参加人数など)により審判員が判断します。
良い記録(もっとも点数の低いもの)から2回分の記録の合計が自分の記録となります。
点数の計算は、次の通りです。
点数 = 時間(秒)+距離(cm)
【例1】
・ゴール時間 32.23秒
・ゴールしてからの距離 10cm の場合
※ 2.23+10=12.23
【例2】
・ゴール時間 28.55秒
・ゴールしてからの距離 5cmの場合
※ 1.45+5=6.45
◎ロボットについて
参加するロボットは、次のものを使ってください。
・梵天丸(無改造、Cギヤ)であること。
◎失格事由(無記録)
競技中に次のような場合には、失格となり記録にはなりません。(再挑戦はできます)
・スタートして、Uターンゾーンに入らないでゴールに向かった。(Uターンゾーンは、梵天丸の一部が入っていればOKとする・・・光センサーによって確認します)
・方向変換をしないで(バックなどで)ゴールに向かった。
・ゴールしなかった。
・バック(後進)の動作をした。
・競技台の壁に梵天丸が触れた。
・リモコンなどで外部から操作した。
・競技途中で梵天丸が動かなくなった(1分以上)。
・人が梵天丸に触れたり競技台を動かした。
・畳から落下した。
・ラインセンサを使った。
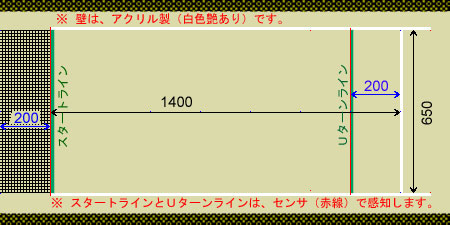
◎競技台
・基本的にフォーミュラー8の競技台から、2つの円筒を取り除きそのまま使います。
・Uターンラインの側面に光センサーを取りつけます。
・梵天丸が走る面(競技台表面)は、畳です。
・壁面は、白アクリル(艶あり)です。<ジャストストップ競技台>
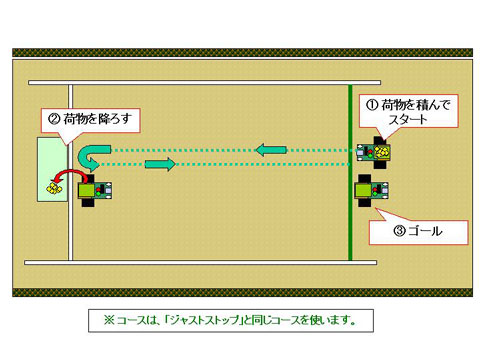
ロボットが、スタートラインからスタートし、目標地点付近で、180度回転し課題物(小玉)を、降ろして、ふたたびスタートライン(基点)に戻る競技です。
できるだけ、早く往復するとともに、荷物を正確に降ろす事で成績が上位になります。
スタートしてからゴールするまでの時間と、目標地点(受皿)を外した場合のペナルティ(減点)の合計(時間)が少ない方が上位の成績となります。
◎スタートのしかた
競技者が直接電源を入れるか、リモコンを使い(ロボットに手を触れないで)、スタートさせます。 スタートの時は、ロボットのすべての部分がスタートラインの手前の畳部に収まることとします。(スタート前の停止状態で、競技台から落ちなければ可とします。)
◎Uターンラインの通過
ロボットは、荷物を降ろす前に必ずUターンをしなくてはなりません。
後方からであれば、どのような方法で荷物を降ろしても可とします。
◎競技台のイメージ
ジャストストップ用の競技台と同じです。
短辺の壁面【高さおよそ5cm】の外に受皿を設置します。 (詳細は、当日発表します。)
◎時間のはかり方 (ジャストストップを同じ計測システムを使用します。)
スタートラインに光センサーを使った計測装置を置いて、審判員がスタートしてからゴールするまでの時間を1/100秒まで計ります。
※光センサーは、畳の面から38mmの位置の部分を判定します。◎積載物
積載物(小玉(発砲材質の俵型)を10個)は、当日主催者が支給します。
積載物の体積は、50mm(短辺)×140mm(長辺)×40mm(高さ)程度です。
荷台の目安は、梵天丸キットに含まれる「オフロードタイヤ(田宮製)」の箱程度の容積です。 なお、機構・形状等は、ロボットの個性として自由に設計をして下さい。
(基本イメージは、ダンプカーのように荷台に積載・運搬し、規定点(受皿)へ投棄するもの。)
◎減点しかた
積載物を下ろす場所(受皿)を外れた個数に2秒を乗じ、上記時間に加算します。
◎順位の決定について
何度でも挑戦できますが、当日の状況(参加人数など)により審判が判断します。
※ 各自の一番速い(もっとも時間の短い。)記録で、順位を付けます。
◎ロボットについて
参加するロボットは、以下の条件に合うものを使ってください。
・自分で判断し動作することのできるもの。(外部から電力供給や制御(パソコンからの命令を受けるもの)を受けるものは使えません)
・たて、横、高さが20cm×20cm×20cmの大きさ以下のもの。(電線なども含みます)
なお、積載物を降ろす際など、一時的に越える場合を除きます。
・競技中に競技台をこわしたり、よごさないもの。
◎失格
競技中に次のような場合には、失格となり記録にはなりません。(再挑戦はできます)
・スタートして、積載物を降ろさずゴールに戻った。
・方向変換をしないで(惰性等で)積載物を降ろした。
・競技場の壁にロボットが触れた。(積載物を降ろす際は、除きます)
・ロボットをリモコンなどで外部から操作した。
・ゴールしなかった。
・人がロボットに触れたり競技台を動かした。
・畳から落下した。
◎競技台
・基本的にジャストストップの競技台を、そのまま使います。
・ロボットが走る面は、畳です。
・壁面は、白アクリル(艶あり)です。 側面(長辺)と、正面(短辺)の高さは違います。
<競技イメージ>
◎ 1分間の間に自分のテーマでパフォーマンスするロボットの競技。(梵天丸以外のロボットでの参加も大歓迎です!!)
◎ 競技の前にテーマと工夫した点を発表する。
(飾り付けや振り付けなどが審査の対象になる。)
Copyright 1997-2006 メカトロで遊ぶ会.